|
Ze Yang 杨泽
I received my Ph.D. in Computer Science from the University of Toronto and the Vector Institute, advised by Prof. Raquel Urtasun.
I am a Staff Research Scientist and Tech Lead at Waabi, focusing on
self-driving technology.
Before joining Waabi, I was a Research Scientist at Uber ATG.
Prior to moving to Toronto, I received a Master's Degree in Computer Science from Peking University, advised by Prof. Liwei Wang.
My research lies at the intersection of 3D computer vision, robotics, and machine learning.
I am building scalable world modeling and simulation systems that facilitate the safe,
controlled, and cost-effective development of autonomous systems.
Email /
CV /
Google Scholar /
Github /
LinkedIn /
Twitter
|
|
|
News
-
NEW
2026/02:
SALF (real-time sensor simulation) and GenRe (generalizable 3D fixer) were accepted by ICRA 2026.
-
2025/09:
Flux4D (unsupervised generalizable 4D reconstruction) was accepted by NeurIPS 2025.
-
2025/03:
GenAssets (in-the-wild 3D assets reconstruction and
generation) was accepted by CVPR 2025.
-
2024/07:
Our work on Neural Sensor Calibration and Generalizable Reconstruction were accepted by ECCV 2024.
-
2024/01:
Our work on 4D World Model for Self-Driving was
accepted by ICLR 2024. Congrats to Lunjun!
-
2023/12:
I gave a talk at MILA Robot Learning Seminar on Learning in-the-wild Sensor Simulation for Autonomous
Driving.
-
2023/09:
LightSim (lighting simulation) was accepted by
NeurIPS 2023. Congrats to Ava, Gary and Jingkang!
-
2023/07:
I gave a talk at Toronto Computational Imaging Group on in-the-wild 3D reconstruction, modeling and
sensor simulation.
-
2023/07:
NeuRas (large scene reconstruction & rendering) was
accepted by ICCV 2023. Congrats to Jeffrey!
-
2023/07:
LiDAR-DG (simulation domain gap analysis) was
accepted by ICCV 2023. Congrats to Siva and Andrei!
-
2023/03:
UniSim (3D scene reconstruction, modeling and
closed-loop sensor simulation for self-driving) was accepted by CVPR 2023 as highlight.
- 2023/01:
NeuSim (3D object reconstruction for sensor
simulation) was accepted by ICRA 2023.
- 2022/10:
CADSim (3D object reconstruction for sensor
simulation) was accepted by CoRL 2022.
- 2022/10:
I gave a talk at ByteDance Research on in-the-wild 3D reconstruction for sensor simulation.
- 2022/03:
RBGNet
(3D object detection) was accepted by CVPR 2022. Congrats to Haiyang!
- 2021/06:
I gave a talk at CVPR 2021 tutorial All About Self-Driving on
dynamic asset reconstruction for simulation.
- 2021/03:
I joined Waabi to work on next-generation self-driving solution.
- 2021/02:
S3
(3D human reconstruction and modeling) was accepted by CVPR 2021.
- 2020/10:
LiME (3D human reconstruction,
modeling and sensor simulation) was accepted by CoRL 2020.
- 2020/09:
I started my Ph.D. journey at the University of Toronro.
- 2020/06:
I joined Uber Advanced Technologies Group (Uber ATG) to work on self-driving technology.
- 2020/06:
I graduated from Peking University.
- 2020/06:
Follow-up work Dense RepPoints was accepted by ECCV
2020.
- 2019/07:
RepPoints
(representing objects as point sets for visual perception) was accepted by ICCV 2019.
- 2018/12:
I started my internship at Microsoft Research Asia to work on visual perception.
|
|
Research
My research goal is to build scalable and realistic digital twins for real-world
modeling, with the purpose of creating immersive and controllable world
simulations that facilitate the development and evaluation of autonomous systems, such as
self-driving vehicles, in a safe, controlled, reactive, and
cost-effective manner.
Towards this goal, I have delved into various areas over the past few years, such as
reconstruction spanning from individual objects to large-scale scene; world modeling
encompassing both rigid and dynamic content; and closed-loop simulation for camera and LiDAR
data.
During the earlier stages of my research, I'm interested in learning flexible and
structural representation for visual perception.
|

|
Diffusion-guided Generalizable Enhancer for Urban Scene Reconstruction
Henry Che,
Jingkang Wang,
Yun Chen,
Ze Yang,
Siva Manivasagam,
Raquel Urtasun
International Conference on Robotics and Automation (ICRA), 2026
bibtex /
paper /
project /
video
|
|
SaLF: Sparse Local Fields for Multi-Sensor Rendering in Real-Time
Yun Chen*,
Matthew Haines*,
Jingkang
Wang,
Sahil Jain,
Krzysztof Lis,
Siva Manivasagam,
Ze Yang,
Raquel Urtasun
International Conference on Robotics and Automation (ICRA), 2026
bibtex /
paper /
project /
video
|
|
Flux4D: Flow-based Unsupervised 4D Reconstruction
Jingkang
Wang*,
Henry Che*,
Yun Chen*,
Ze Yang,
Lily Goli,
Siva Manivasagam,
Raquel Urtasun
Neural Information Processing Systems (NeurIPS), 2025
bibtex /
paper /
project /
video
|

|
GenAssets: Generating in-the-wild 3D Assets in Latent Space
Ze Yang,
Jingkang
Wang,
Haowei Zhang,
Siva Manivasagam,
Yun Chen,
Raquel Urtasun
Conference on Computer Vision and Pattern Recognition (CVPR), 2025
bibtex /
paper
/
poster /
project /
video
|

|
UniCal: Unified Neural Sensor Calibration
Ze Yang*,
George Chen*,
Haowei Zhang,
Kevin Ta,
Ioan Andrei
Bârsan,
Daniel Murphy,
Siva Manivasagam,
Raquel Urtasun
European Conference on Computer Vision (ECCV), 2024
bibtex /
paper /
poster /
project /
video
|

|
G3R: Gradient Guided Generalizable Reconstruction
Yun Chen*,
Jingkang
Wang*,
Ze Yang,
Siva Manivasagam,
Raquel Urtasun
European Conference on Computer Vision (ECCV), 2024
bibtex /
paper /
poster /
project /
video
|
|
Copilot4D: Learning Unsupervised World Models for Autonomous Driving via Discrete Diffusion
Lunjun Zhang,
Yuwen Xiong,
Ze Yang,
Sergio Casas,
Rui Hu,
Raquel Urtasun
International Conference on Learning Representations (ICLR), 2024
bibtex /
paper /
poster /
project /
video
|
|
LightSim: Neural Lighting Simulation for Urban Scenes
Ava Pun*,
Gary Sun*,
Jingkang
Wang*,
Yun Chen,
Ze Yang,
Siva Manivasagam,
Wei-Chiu Ma,
Raquel Urtasun
Neural Information Processing Systems (NeurIPS), 2023
bibtex /
paper /
poster /
project /
video /
4K demo
|

|
Real-Time Neural Rasterization for Large Scenes
Jeffrey Yunfan Liu,
Yun Chen*,
Ze Yang*,
Jingkang
Wang,
Siva Manivasagam,
Raquel Urtasun
International Conference on Computer Vision (ICCV), 2023
bibtex /
paper
/
poster /
project /
video
|
|
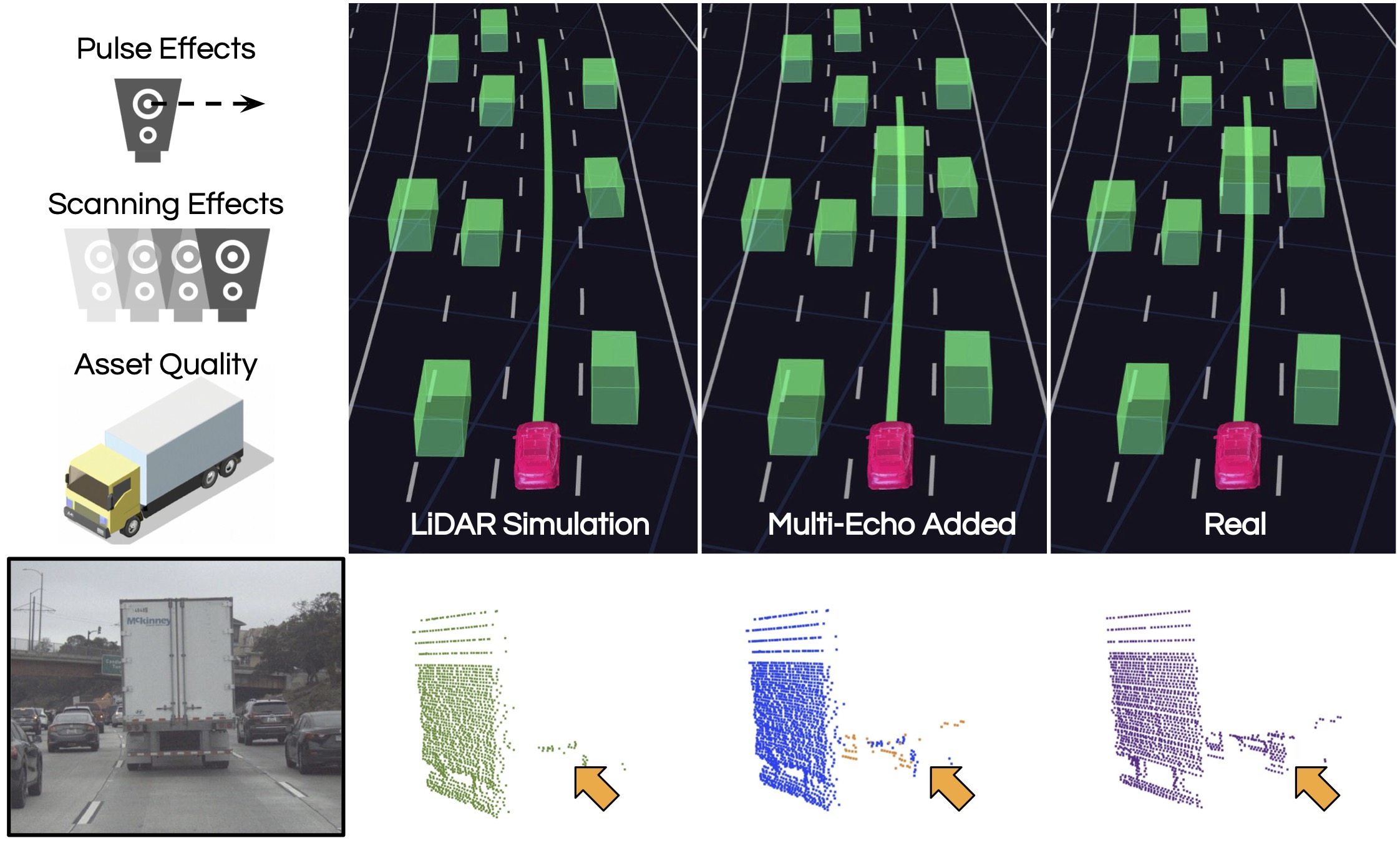
Towards Zero Domain Gap: A Comprehensive Study of Realistic LiDAR Simulation for Autonomy Testing
Siva Manivasagam*,
Ioan Andrei
Bârsan*,
Jingkang
Wang,
Ze Yang,
Raquel Urtasun
International Conference on Computer Vision (ICCV), 2023
bibtex /
paper
/
poster /
project /
video
|
|
UniSim: A Neural Closed-Loop Sensor Simulator
Ze Yang*,
Yun Chen*,
Jingkang
Wang*,
Siva Manivasagam*,
Wei-Chiu Ma,
Anqi Joyce
Yang,
Raquel Urtasun
Conference on Computer Vision and Pattern Recognition (CVPR), 2023
bibtex /
blog
/
paper
/
poster /
project /
supp /
video /
4K demo
|
|
Reconstructing Objects in-the-wild for Realistic Sensor Simulation
Ze Yang,
Siva Manivasagam,
Yun Chen,
Jingkang
Wang,
Rui Hu,
Raquel Urtasun
International Conference on Robotics and Automation (ICRA), 2023
bibtex /
paper /
poster /
project /
reconstructions /
video
|
|
CADSim: Robust and Scalable in-the-wild 3D Reconstruction for Controllable Simulation
Jingkang
Wang,
Siva Manivasagam,
Yun Chen,
Ze Yang,
Ioan Andrei
Bârsan,
Anqi Joyce
Yang,
Wei-Chiu Ma,
Raquel Urtasun
Conference on Robot Learning (CoRL), 2022
bibtex /
paper /
poster /
project /
video
|
|
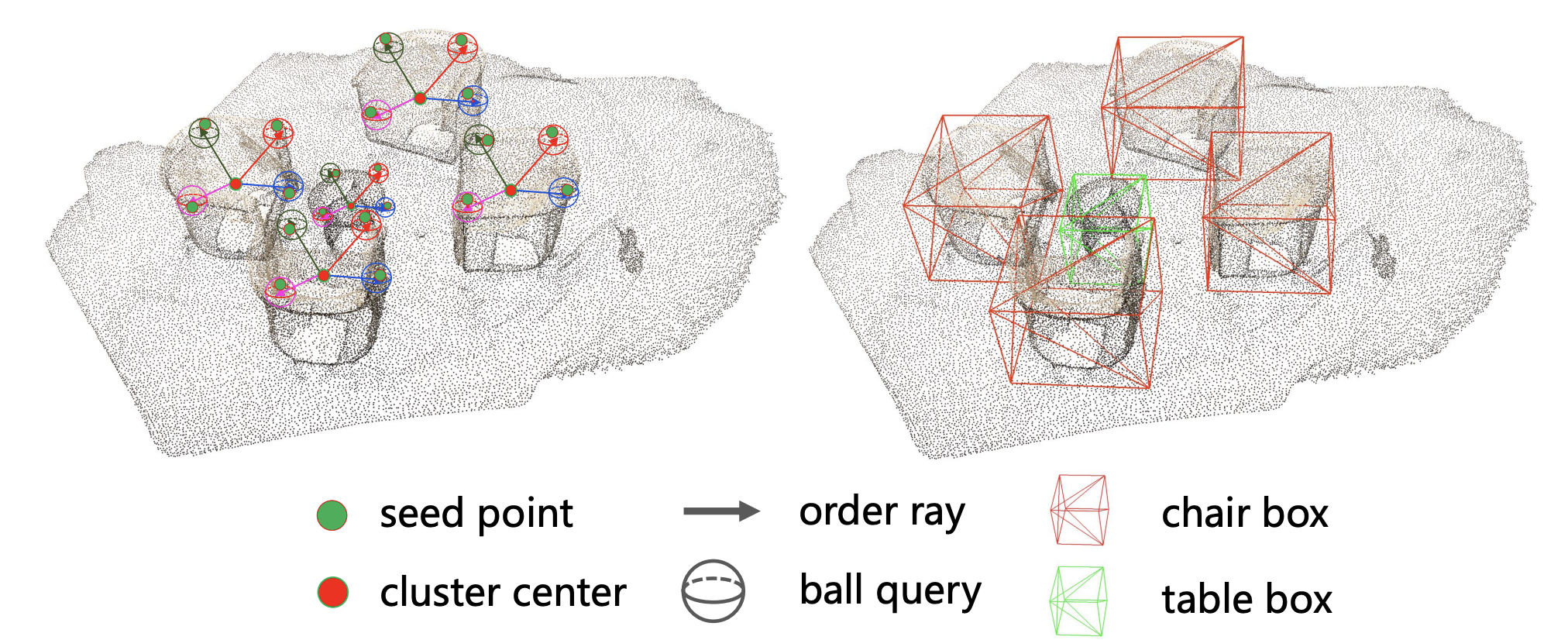
RBGNet: Ray-based Grouping for 3D Object Detection
Haiyang
Wang,
Shaoshuai Shi,
Ze Yang,
Rongyao
Fang,
Qi
Qian,
Hongsheng
Li,
Bernt
Schiele,
Liwei Wang
Conference on Computer Vision and Pattern Recognition (CVPR), 2022
bibtex /
code /
paper
|
|
S3: Neural Shape, Skeleton, and Skinning Fields for 3D Human Modeling
Ze Yang,
Shenlong Wang,
Siva Manivasagam,
Zeng Huang,
Wei-Chiu Ma,
Xinchen Yan,
Ersin Yumer,
Raquel Urtasun
Conference on Computer Vision and Pattern Recognition (CVPR), 2021
bibtex /
paper
/
poster /
project /
video
|

|
Recovering and Simulating Pedestrians in the Wild
Ze Yang,
Siva Manivasagam,
Ming Liang,
Bin Yang,
Wei-Chiu Ma,
Raquel Urtasun
Conference on Robotic Learning (CoRL), 2020
bibtex /
paper /
simulation /
video
|
|
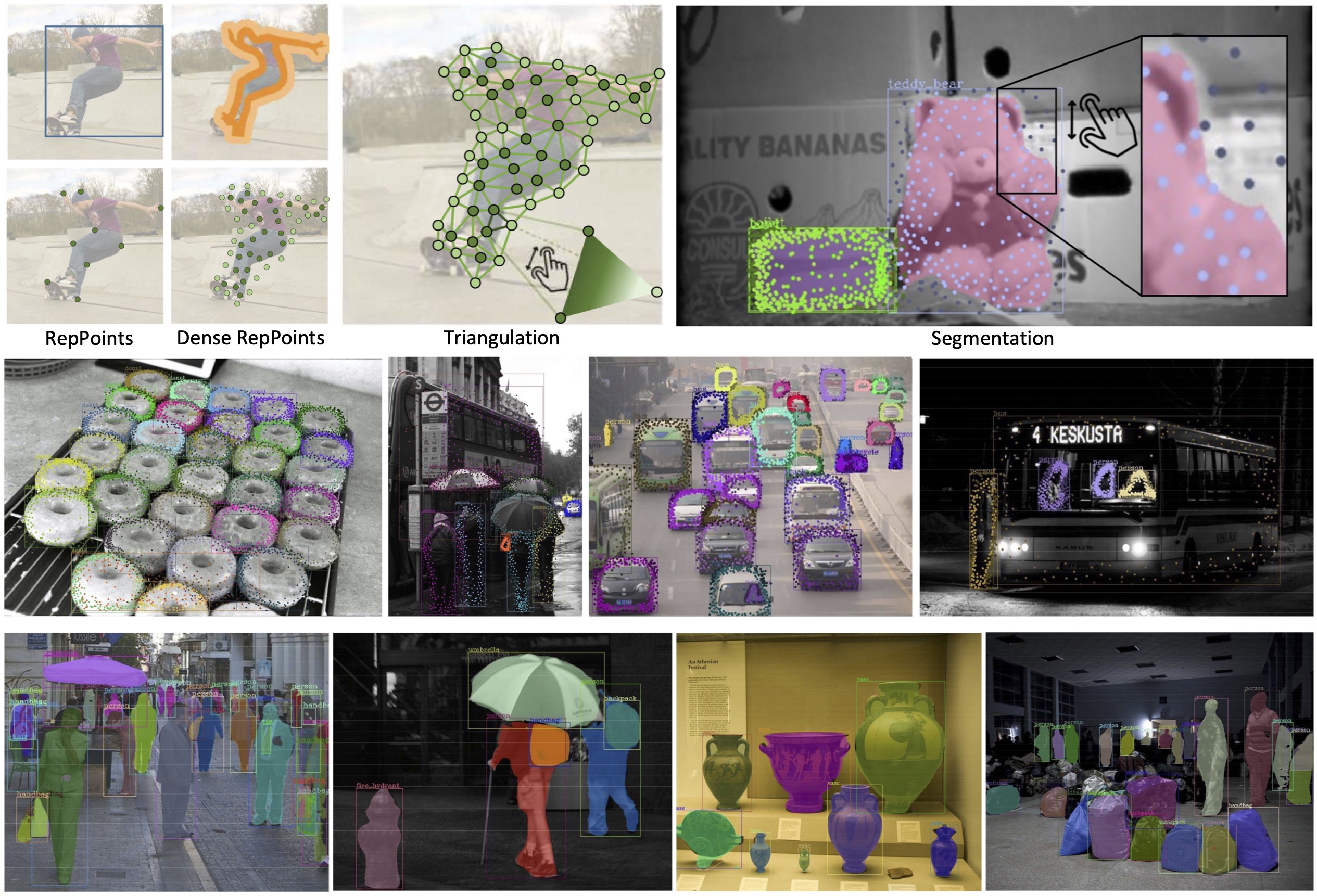
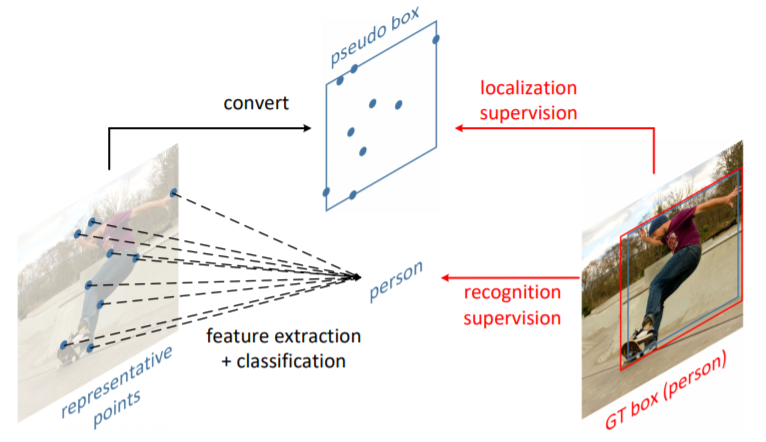
Dense RepPoints: Representing Visual Objects with Dense Point Sets
Ze Yang*,
Yinghao Xu*,
Han Xue*,
Zheng Zhang,
Raquel Urtasun,
Liwei Wang,
Steve Lin,
Han Hu
European Conference on Computer Vision (ECCV), 2020
bibtex /
code /
paper /
slides /
video
|
|
RepPoints: Point Set Representation for Object Detection
Ze Yang*,
Shaohui Liu*,
Han Hu,
Liwei Wang,
Steve Lin
International Conference on Computer Vision (ICCV), 2019
bibtex /
blog
/
code /
mmdet /
paper
/
poster /
slides
|
|
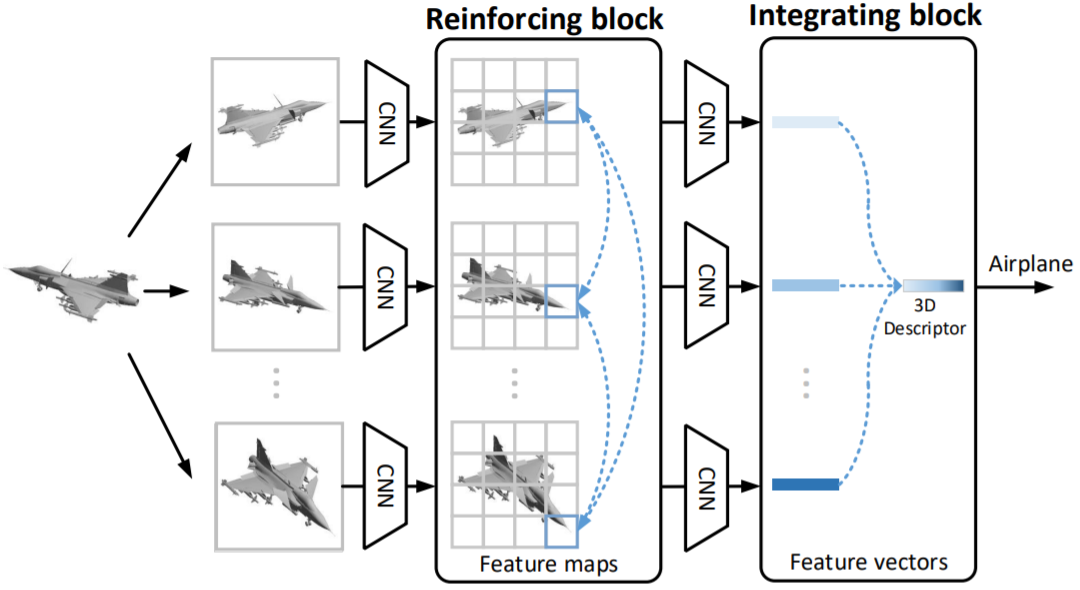
Learning Relationships for Multi-view 3D Object Recognition
Ze Yang,
Liwei Wang.
International Conference on Computer Vision (ICCV), 2019
bibtex /
paper
/
poster
|
|
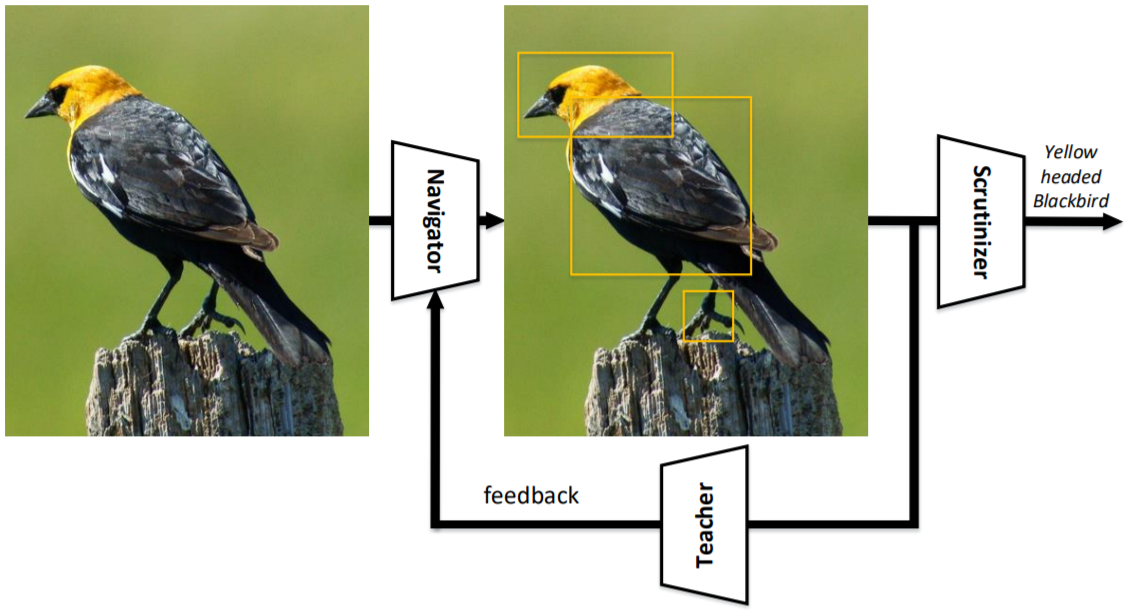
Learning to Navigate for Fine-grained Classification
Ze Yang,
Tiange Luo,
Dong Wang,
Zhiqiang Hu,
Jun Gao,
Liwei Wang
European Conference on Computer Vision (ECCV), 2018
bibtex /
code /
paper
/
poster /
slides
|
|
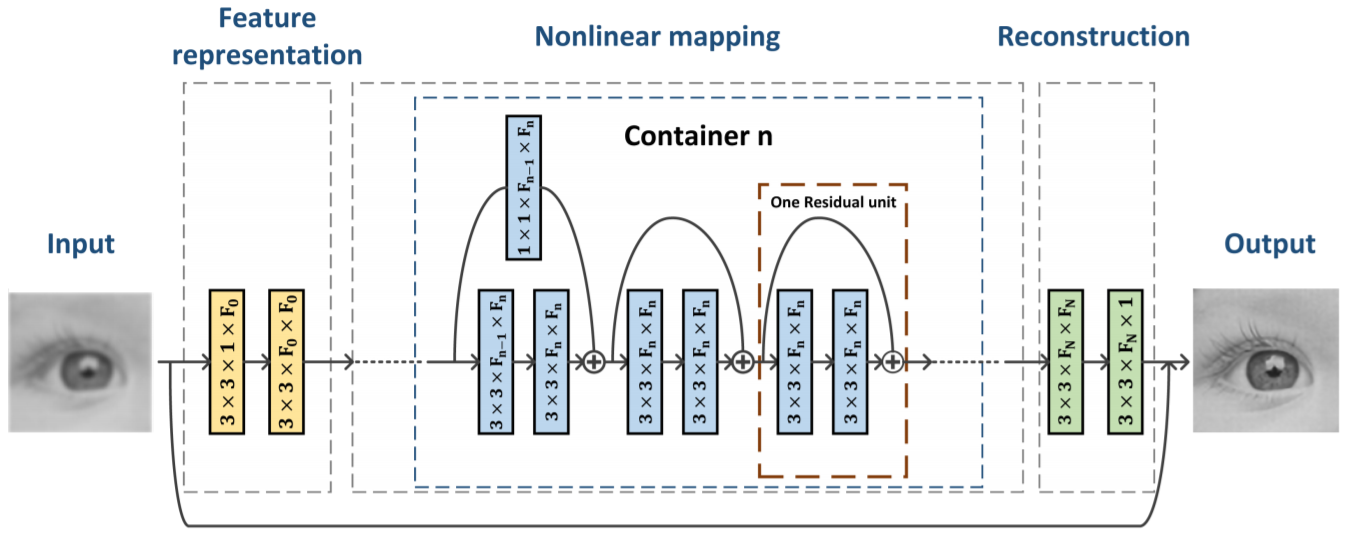
Single Image Super-Resolution with a Parameter Economic Residual-Like Convolutional Neural Network
Ze Yang,
Kai
Zhang,
Yudong
Liang,
Jinjun Wang
International Conference on Multimedia Modeling, 2017
bibtex /
paper
|

|
Waabi
| Staff Research Scientist |
2025 – Present |
| Senior Research Scientist |
2023 – 2025 |
| Research Scientist |
2021 – 2023 |
Worked on scalable world modeling and simulation for self-driving.
|

|
Uber Advanced Technologies Group
| Research Scientist |
2020 – 2021 |
| Research Intern |
2019 - 2020 |
Worked on 3D reconstruction, modeling and simulation for self-driving.
|

|
Microsoft Research Asia
| Research Intern |
2018 - 2019 |
Worked on visual perception.
|
|
Academic Service
- Conference Reviewer:
CVPR, ICCV, ECCV, ACCV, WACV, ICRA, IROS, NeurIPS, ICLR, ICML, AAAI
- Journal Reviewer:
TPAMI,
TCSVT,
TMM
|
|