Siva ManivasagamI am a PhD student at the University of Toronto, advised by Raquel Urtasun, and a member of the Vector Institute. I am also a Sr. Staff Researcher and Technical Lead Manager at Waabi, leading the sensor simulation team. My research lies at the intersection of computer vision, machine learning, and robotics. I build scalable sensor simulation and 3D reconstruction systems for the safe development and testing of autonomous driving. Email / Google Scholar / CV |

|

|
International Conference on Robotics and Automation (ICRA), 2026 project / paper A generalizable 3D enhancer for urban scene reconstruction using diffusion guidance. |

|
International Conference on Robotics and Automation (ICRA), 2026 project / paper / video A unified representation for multi-sensor simulation in real-time via rasterization and ray tracing. |
|
Neural Information Processing Systems (NeurIPS), 2025 project / paper / video A simple, scalable framework for unsupervised generalizable 4D reconstruction of large-scale driving scenes. |

|
Conference on Computer Vision and Pattern Recognition (CVPR), 2025 project / paper / video Reconstruct or generate 360° assets from in-the-wild images and LiDAR with UniSim + latent diffusion. |

|
European Conference on Computer Vision (ECCV), 2024 project / paper / video A generalizable large reconstruction model for outdoor dynamic scenes with real-time full camera simulation. |
|
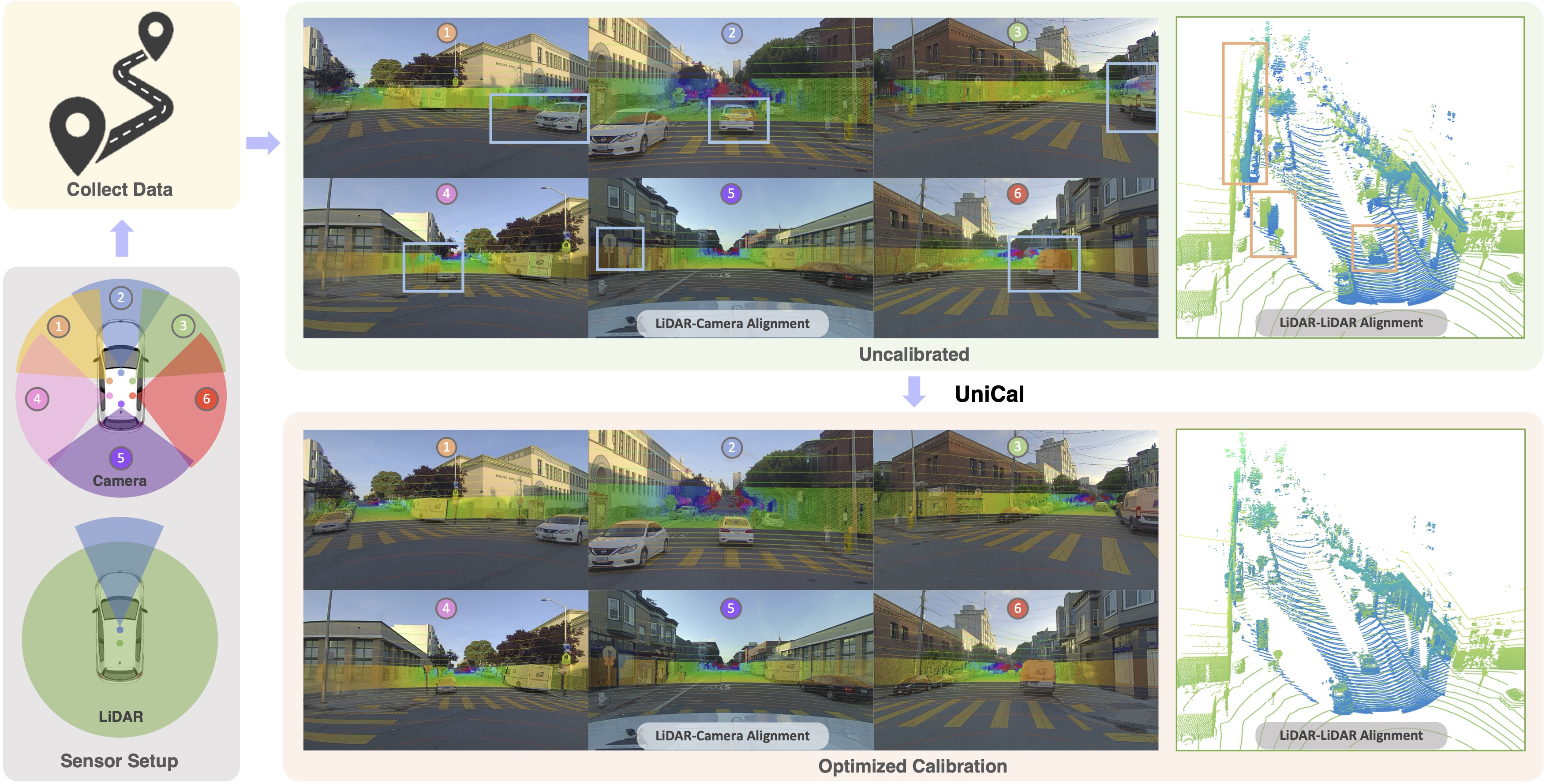
European Conference on Computer Vision (ECCV), 2024 project / paper / video Unified neural approach to multi-sensor calibration for autonomous driving. |

|
Neural Information Processing Systems (NeurIPS), 2023 project / paper / video A data-driven neural lighting simulation system for urban scenes with diverse, controllable, and realistic output. |

|
Conference on Robot Learning (CoRL), 2023 project / paper / video Closed-loop simulation to identify challenging object shapes and autonomy failure modes. |

|
International Conference on Computer Vision (ICCV), 2023 project / paper / video Neural texture features + MLP shader for real-time rendering (>120 FPS at 1080p). |

|
International Conference on Computer Vision (ICCV), 2023 project / paper / video Analyzing the impact of LiDAR sensor simulation fidelity on the full autonomy stack. |

|
Conference on Computer Vision and Pattern Recognition (CVPR), 2023 (Highlight) project / paper A data-driven closed-loop sensor simulator generating realistic counterfactual scenarios from a single driving pass. |

|
International Conference on Robotics and Automation (ICRA), 2023 project / paper Physics-guided NeRF for object reconstruction from sparse, noisy in-the-wild data. |
|
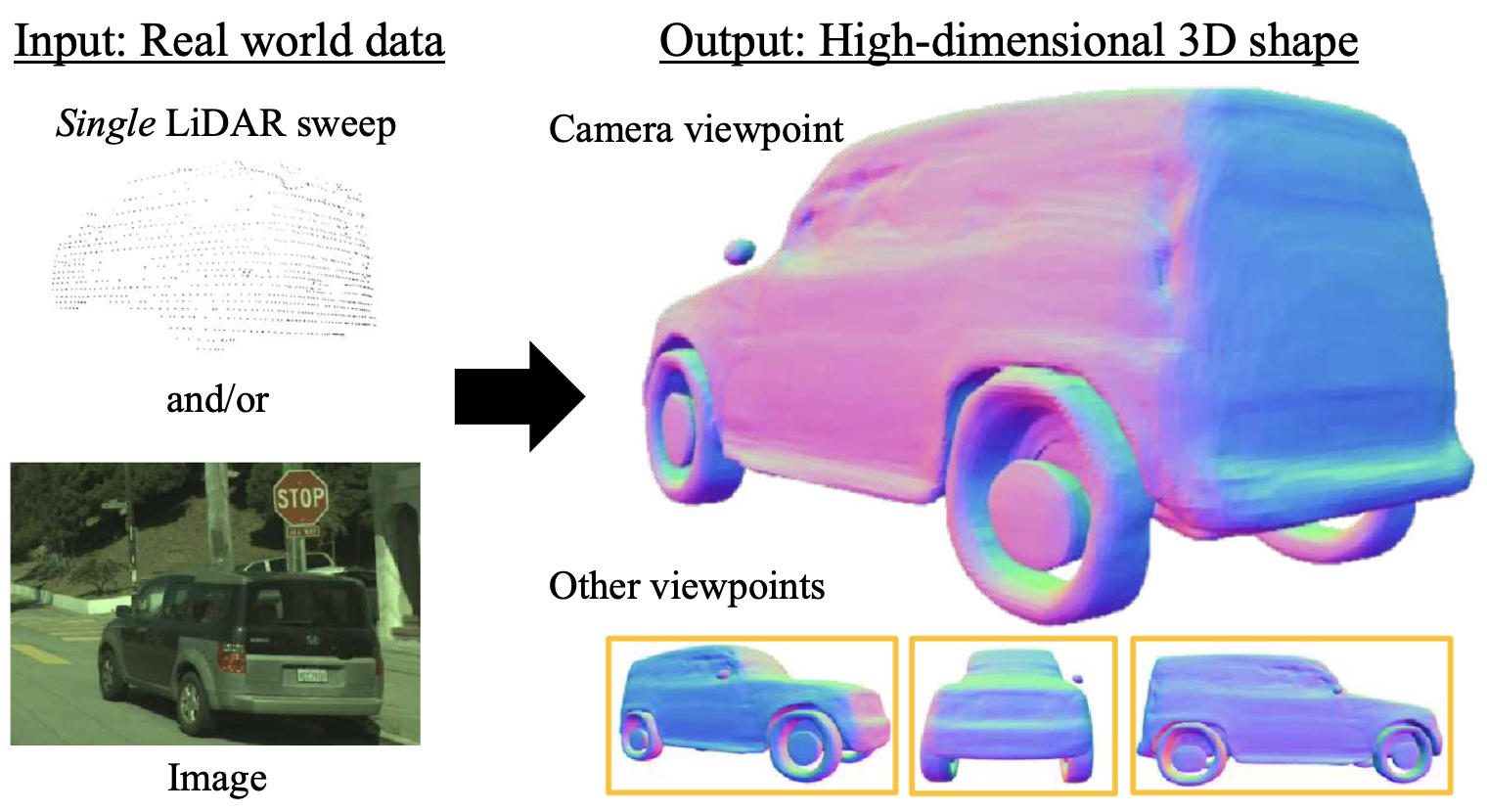
Winter Conference on Applications of Computer Vision (WACV), 2022 arXiv / paper Robust neural implicit shape reconstruction for vehicles from sparse, noisy real-world observations. |

|
Conference on Robot Learning (CoRL), 2022 project / paper Inverse rendering of articulated geometry, PBR material, and lighting from CAD templates. |

|
International Conference on Computer Vision (ICCV), 2021 paper Adversarial robustness in cooperative multi-agent communication systems. |

|
Conference on Computer Vision and Pattern Recognition (CVPR), 2021 (Oral, Best Paper Award Candidate) project / paper Photorealistic image simulation via geometry-aware composition for self-driving. |

|
Conference on Computer Vision and Pattern Recognition (CVPR), 2021 project / paper Safety-critical scenario generation using realistic mixed-reality LiDAR simulation. |
|
Conference on Computer Vision and Pattern Recognition (CVPR), 2021 paper Neural implicit fields for 3D human shape, skeleton, and skinning reconstruction. |
|
Conference on Computer Vision and Pattern Recognition (CVPR), 2021 paper Learning to generate realistic traffic scene layouts for self-driving simulation. |
|
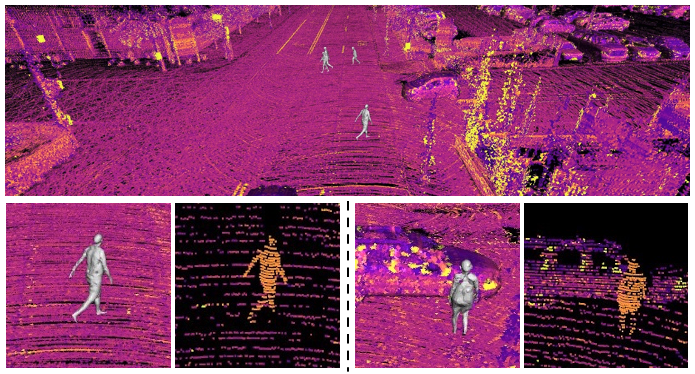
Conference on Robot Learning (CoRL), 2020 (Spotlight) paper Recovering 3D pedestrian models from LiDAR for realistic sensor simulation. |
|
European Conference on Computer Vision (ECCV), 2020 (Oral) paper Vehicle-to-vehicle communication network for joint perception and prediction in self-driving. |
|
European Conference on Computer Vision (ECCV), 2020 (Spotlight) paper Estimating shape and pose from partial LiDAR point clouds without ground-truth supervision. |
|
European Conference on Computer Vision (ECCV), 2020 (Spotlight) paper Solving inverse problems using the forward process as feedback for an iterative update model. |
|
Conference on Computer Vision and Pattern Recognition (CVPR), 2020 (Oral) paper Realistic LiDAR sensor simulation leveraging real-world data for closed-loop evaluation. |
|
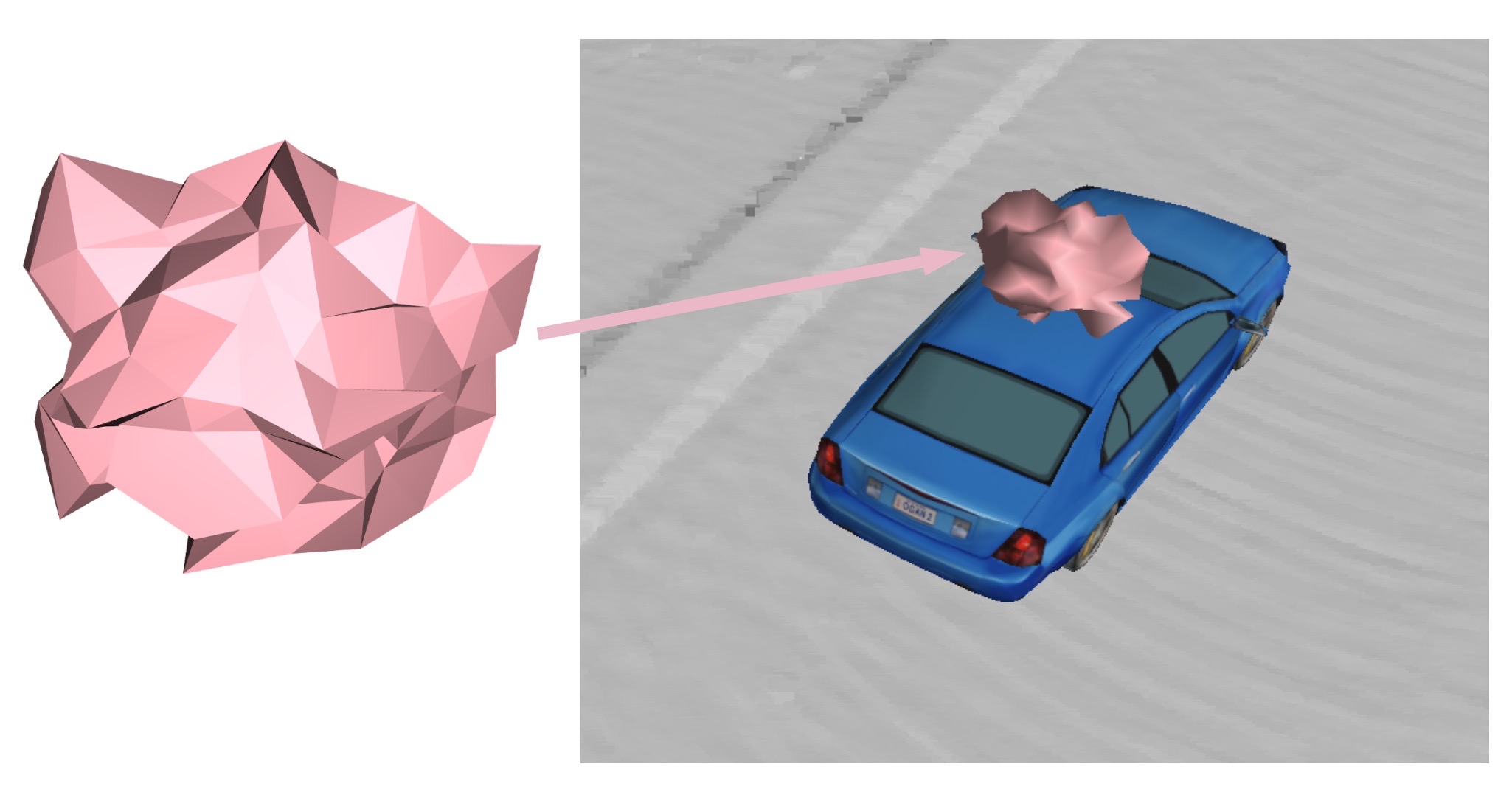
Conference on Computer Vision and Pattern Recognition (CVPR), 2020 paper Universal rooftop adversarial attack that hides vehicles from LiDAR object detectors. |