|
Marcus A. Brubakermbru...@cs.toronto.edu Assistant Professor, York University |
Contents |
||||||||||||
News |
||||||||||||
|
July 2016 I am now an Assistant Professor at York University. This website will continue to exist for now but will not be updated further. My new website is available here October 2015 There has been much going on behind the scenes these last few months. First, code for "Building Proteins in a Day: Efficient 3D Molecular Reconstruction" has finally been released on GitHub. Feel free to check it out and file any issues on the GitHub issue tracker. Several new papers have been published including
April 2015 I'm very pleased to report that my most recent paper "Building Proteins in a Day: Efficient 3D Molecular Reconstruction" with Ali Punjani and David Fleet has been accepted for oral presentation at CVPR 2015. I have also been invited to give a symposium at the 2015 Conference on Computer and Robot Vision in Halifax this June. This will be something of a preview of my talk at CVPR 2015. January 2015 Following on Ali's presentation at the NIPS Machine Learning in Computational Biology Workshop we have published a technical report on arXiv: "Microscopic Advances with Large-Scale Learning: Stochastic Optimization for Cryo-EM". We've also just published an arXiv paper about correcting magnification anisotropy in Cryo-EM images. December 2014 Ali Punjani and I will be presenting some of our recent work on 3D structure estimation in CryoEM at the NIPS Machine Learning in Computational Biology Workshop. If you're going to be at NIPS, come by and check it out. October 2014 A new paper with John Rubinstein has been posted to arXiv describing a method of particle movie alignment for CryoEM: Alignment of cryo-EM movies of individual particles by global optimization of image translations. August 2014 I will be, once again, teaching at UTSC this fall: CSCC11 - Introduction to Machine Learning July 2014 Recent work with Yali Wang and Raquel Urtasun on online filtering with Gaussian Processes is now available and will be presented at UAI 2014 in a few days. October 2013 Recent work with Yanshaui Cao, Aaron Hertzmann and David Fleet on sparse Gaussian Processes is now available on arXiv: Efficient Optimization for Sparse Gaussian Process Regression. This will be presented at NIPS 2013. Stan 2.0 has just been released. Lots of big changes in this version so go check it out if you're interested in Bayesian statistical estimation and MCMC. September 2013 I will be speaking to the Toronto chapter of the IEEE Computer Society on September 26th on my recent localization work. Recent work with Yanshaui Cao, Aaron Hertzmann and David Fleet on Gaussian Process sparsification has been accepted for publication at NIPS 2013. This paper will be available soon. Also, this term I will be teaching CSCC11: Introduction to Machine Learning and Data Mining at the University of Toronto, Scarborough. August 2013 Source code for Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization is now available on the project website! July 2013 My recent project on vehicle localization using visual odoemtry has been written up in New Scientist. I have also made available a PDF version of the slides used for my CVPR 2013 presentation. They can be accessed from the project website. June 2013 Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization was selected as the Best Paper Runner-Up at CVPR 2013! See the project website for the video, paper and poster, which was just recently uploaded.
April 2013
My most recent project, "Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization" with Andreas Geiger and Raquel Urtasun, has been accepted for an oral presentation at CVPR 2013. See the project website for the video and paper. February 2013 My paper with Jianhua Zhao and John L. Rubinstein is now available: TMaCS: A hybrid template matching and classification system for partially-automated particle selection. Source can be found here. December 2012 A paper with Jianhua Zhao and John L. Rubinstein, "TMaCS: A hybrid template matching and classification system for partially-automated particle selection" has been accepted for publication in the Journal of Structural Biology. It's not available yet, but look for it soon. August 2012 This fall I will be teaching CSCD11: Machine Learning and Data Mining at the University of Toronto, Scarborough. July 2012 Better late than never, some of the video sequences used in my papers are now available from here. Videos of results from a number of my papers have also been uploaded to YouTube. April 2012 I've begun organizing a Computer Vision Reading Group at U of T. The first meeting will be May 15th. February 2012 Our paper (with Mathieu Salzmann and Raquel Urtasun) "A Family of MCMC Methods on Implicitly Defined Manifolds" will be presented at AISTATS 2012. Matlab code is available here. October 2011 I have finished my PhD thesis "Physical Models of Human Motion for Estimation and Scene Analysis" and have started a postdoc with Raquel Urtasun (Toyota Technological Institute at Chicago) and David Fleet (University of Toronto). I am now also consulting as Research Associate with Cadre Research Labs. August 2010 Our paper "A Bayesian Method for 3-D Macromolecular Structure Inference using Class Average Images from Single Particle Electron Microscopy" has been accepted into the journal Bioinformatics. A preprint of the paper is available here and the project website can be found here. January 2010 Citation information has been updated for the IJCV article to include the volume, issue and starting page numbers. August 2009 Three new papers have been made available: "Estimating Contact Dynamics" (ICCV 2009), "Physics-based Person Tracking Using the Anthropomorphic Walker" (IJCV 2010), and "Video-based People Tracking" (In Handbook of Ambient Intelligence and Smart Environments). Leonid Sigal, David Fleet and I will be running a tutorial for ICCV 2009: "Physics-Based Human Motion Modelling for People Tracking". |
||||||||||||
Projects
|
||||||||||||
|
||||||||||||
Background Information |
||||||||||||
|
I am currently a Postdoctoral Fellow at the University of Toronto Scarborough. I also work as a Research Associate with Cadre Research Labs. Previously I worked with Raquel Urtasun (Toyota Technological Institute at Chicago). I finished my Ph.D. in September of 2011 supervised by David Fleet at the University of Toronto in the Computer Vision group. I received my M.Sc. and Honors B.Sc. from the University of Toronto in November 2006 and June 2004 respectively. Feel free to contact me at mbru...@cs.toronto.edu. |
||||||||||||
Research Interests |
||||||||||||
|
Generally, I have a strong interest in machine learning
and probabilistic methods, particularly when applied to
computer vision related problems.
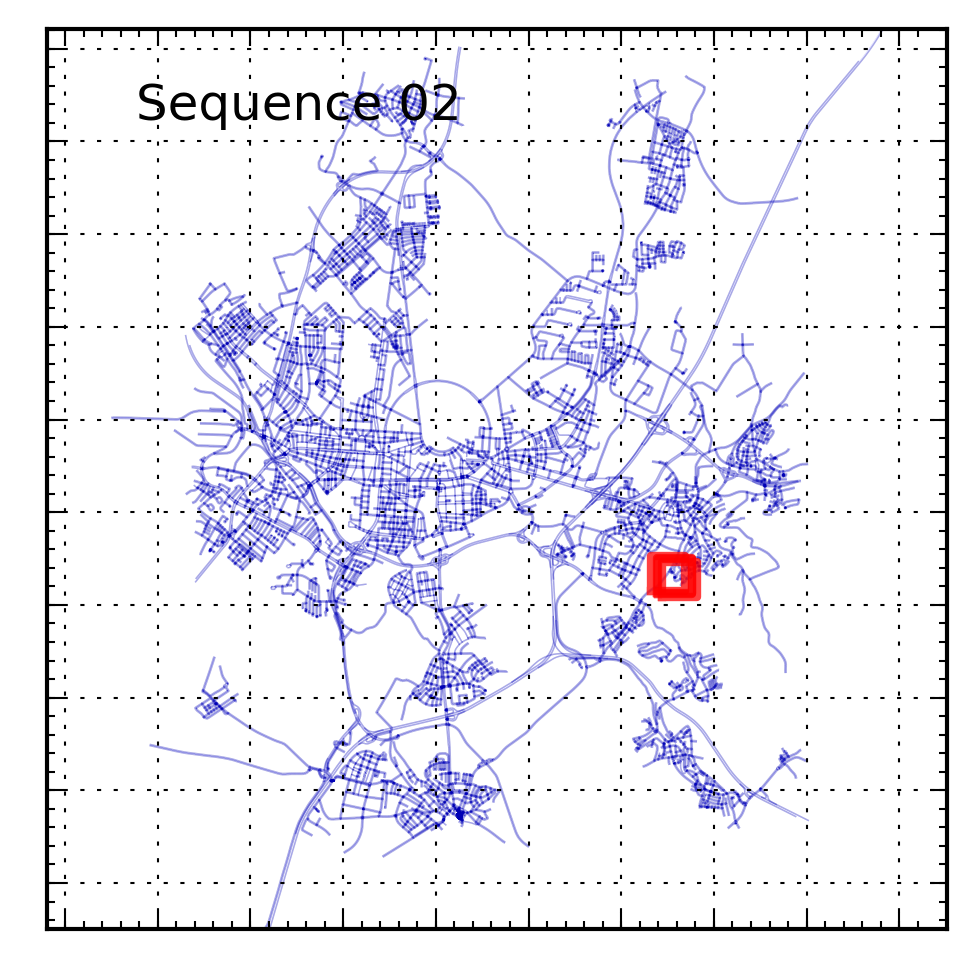
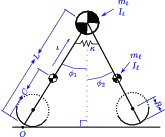
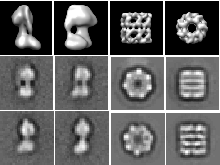
Recently I looked at the use of map data in computer vision applications such as localization through the use of visual odometry. My PhD research looked at the use of physics for tracking human motion. I explored abstract models of bipedal walking in the context of monocular tracking with particle filters and the dynamics of complex articulated models of the human body in motion estimation and dynamic scene analysis. I have also been interested in the problems surrounding Electron Cryo-Microscopy, an imaging technique used to estimate the structure of small molecules such as proteins and viruses. With colleagues I looked at the use of Bayesian methods for single particle reconstruction and have recently helped investigate using modern Machine Learning techniques in semi-supervised particle picking. |
||||||||||||
Hobbies and Other Interests
|
||||||||||||
|