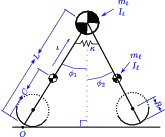
This project explores the use of abstract, physics-based models of
human locomation in tracking. Abstract models, like the one
shown above, are used in robotics and biomechanics to capture key
aspects of the dynamics of human locomotion. Some of them
exhibit humanoid-like walking as passive limit cycles of their
motion, exhibiting their stability and applicability to human motion
modelling. This project aims to use these abstractions to
build motion models which can then be used to constrain human pose
tracking.
Data
Some of the video sequences
used are available here:
Physics-based Person
Tracking Using the Anthropomorphic Walker. Marcus A
Brubaker, David J Fleet and Aaron Hertzmann. International
Journal of Computer Vision, 2010. (pdf)(code)
The Kneed Walker for Human
Pose Tracking. Marcus A Brubaker and David J
Fleet. In Proceedings of IEEE CVPR 2008. (pdf)(avi)(YouTube)
Physics-based Person
Tracking Using Simplified Lower Body Dynamics. Marcus A
Brubaker, David J Fleet and Aaron Hertzmann. In
Proceedings of IEEE CVPR 2007. (pdf)(avi)(YouTube)
Selected References
Energetics of Actively
Powered Locomotion Using the Simplest Walking Model.
Art D. Kuo. Journal of Biomechanical Engineering. No. 124, pgs
113-120, 2002. (pdf)
A Simple Model Predicts the
Step Length-Speed Relationship in Human Walking. Art D.
Kuo. Journal of Biomechanical Engineering. No. 123, pgs 264-269,
2001. (pdf)
Dynamics and Control of
Bipedal Locomotion. Tad McGeer. Journal of Theoretical
Biology. No. 163, pgs 277-314, 1993. (pdf)
Passive Dynamic Walking.
Tad McGeer. International Journal of Robotics Research, Vol. 9,
No. 2, pgs 62-82, 1990. (pdf)