3D Reconstruction for Controllable Sensor Simulation
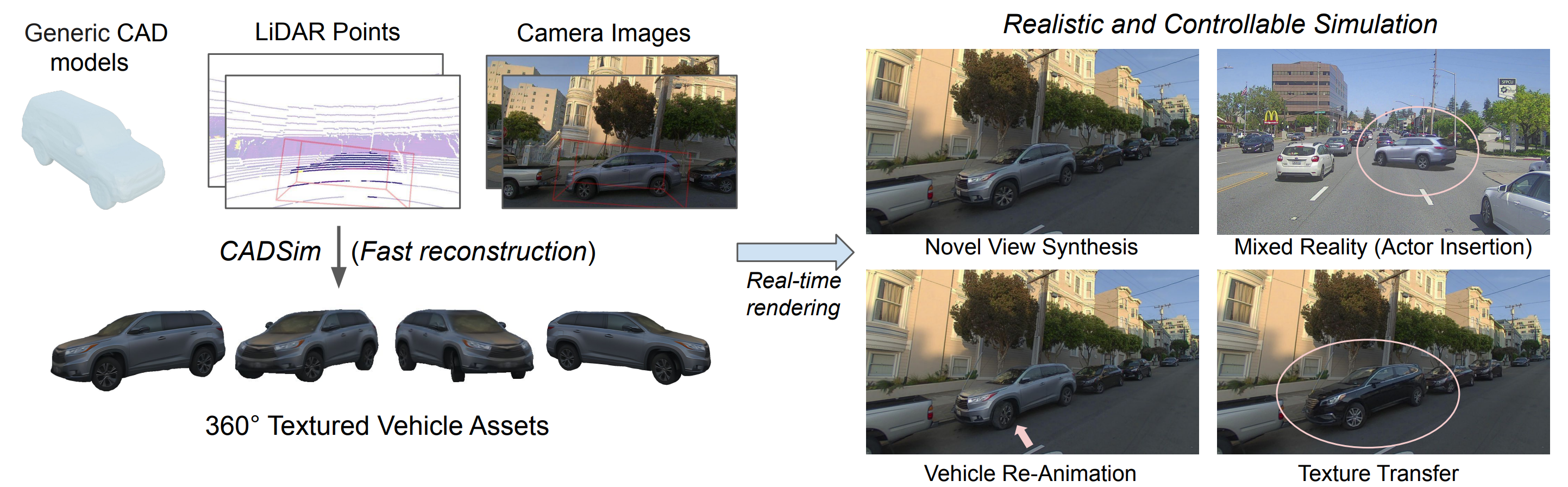
Realistic simulation is key to enabling safe and scalable development of self-driving vehicles. A core component is simulating the sensors so that the entire autonomy system can be tested in simulation. Sensor simulation involves modeling traffic participants, such as vehicles, with high-quality appearance and articulated geometry, and rendering them in real-time. The self-driving industry has employed artists to build these assets. However, this is expensive, slow, and may not reflect reality. Instead, reconstructing assets automatically from sensor data collected in the wild would provide a better path to generating a diverse and large set that provides good real-world coverage. However, current reconstruction approaches struggle on in-the-wild sensor data, due to its sparsity and noise. To tackle these issues, we present CADSim which combines part-aware object-class priors via a small set of CAD models with differentiable rendering to automatically reconstruct vehicle geometry, including articulated wheels, with high-quality appearance. Our experiments show our approach recovers more accurate shape from sparse data compared to existing approaches. Importantly, it also trains and renders efficiently. We demonstrate our reconstructed vehicles in a wide range of applications, including accurate testing of autonomy perception systems.
- Fixed topology: CADSim’s main assumption is that it requires CAD models for the object class of interest. We note that CAD models are readily available for most object classes, and that our approach only requires encoding semantic priors for a single CAD asset, as our energy-model optimization allows for transfer of these priors to other assets of the same class
- Limited inpainting capcity: Although we apply local smoothness and symmetry priors in the appearance energy terms, CADSim still cannot hallucinate missing pixels if the coverage is too limited.
- Rely on segmentation masks, LiDAR points and rough camera parameters
- Limited quality for non-vehicle classes or when the topology is complex
@inproceedings{wang2022cadsim,
author = {Wang, Jingkang and Manivasagam, Sivabalan and Chen, Yun and Yang, Ze, and and Yang, Anqi and Bârsan Andrei and Ma, Wei-Chiu and Urtasun, Raquel}
title = {CADSim: Robust, Scalable and Controllable in-the-wild 3D Reconstruction for Sensor Simulation},
booktitle = {{CoRL}},
year = {2022}
}