|
Anqi Joyce Yang
I am a Ph.D. student in the Machine Learning Group at the University of Toronto, advised by
Prof. Raquel Urtasun. I am also a researcher at Waabi Innovation
and a member of the Vector Institute.
Previously I completed my M.Sc. in the same group, and my B.Sc. in Computer Science
at the University of Waterloo, with a minor in Combinatorics and Optimization.
My general research interests involve computer vision, machine learning and robotics. I have mostly worked with detecting, localizing and reconstructing
objects in the self-driving setting using 3D geometry and deep learning.
Email /
Github /
Google Scholar /
Twitter
|
|
LabelFormer: Object Trajectory Refinement for Offboard Perception from LiDAR Point Clouds
Anqi Joyce Yang,
Sergio Casas,
Nikita Dvornik,
Sean Segal,
Yuwen Xiong,
Jordan Hu,
Carter Fang,
Raquel Urtasun
CoRL, 2023
[Paper] [arXiv] [Reviews] [video (1 min)] [video (6 min)]
To tackle LiDAR-based auto-labelling/offboard perception within a two-stage initialize then refine paradigm, we propose LabelFormer, a transformer-based simple, efficient and effective object trajectory-level refinement method.
|
|
Towards Unsupervised Object Detection from LiDAR Point Clouds
Lunjun Zhang,
Anqi Joyce Yang,
Yuwen Xiong,
Sergio Casas,
Bin Yang,
Mengye Ren,
Raquel Urtasun
CVPR, 2023
[Paper] [video]
We introduce a simple yet effective LiDAR-based unsupervised object detection method that uses point clustering and near-range training to bootstrap, temporal consistency to refine, and self-training to iterate.
|
|
UniSim: A Neural Closed-Loop Sensor Simulator
Ze Yang*,
Yun Chen*,
Jingkang Wang*,
Siva Manivasagam*,
Wei-chiu Ma,
Anqi Joyce Yang,
Raquel Urtasun
CVPR, 2023
[Paper] [video]
We present a neural closed-loop sensor simulation method. UniSim turns a single recorded log into a unified LiDAR and camera simulator, which generates realistic sensor data to evaluate autonomy system on safety-critical scenarios.
|
|
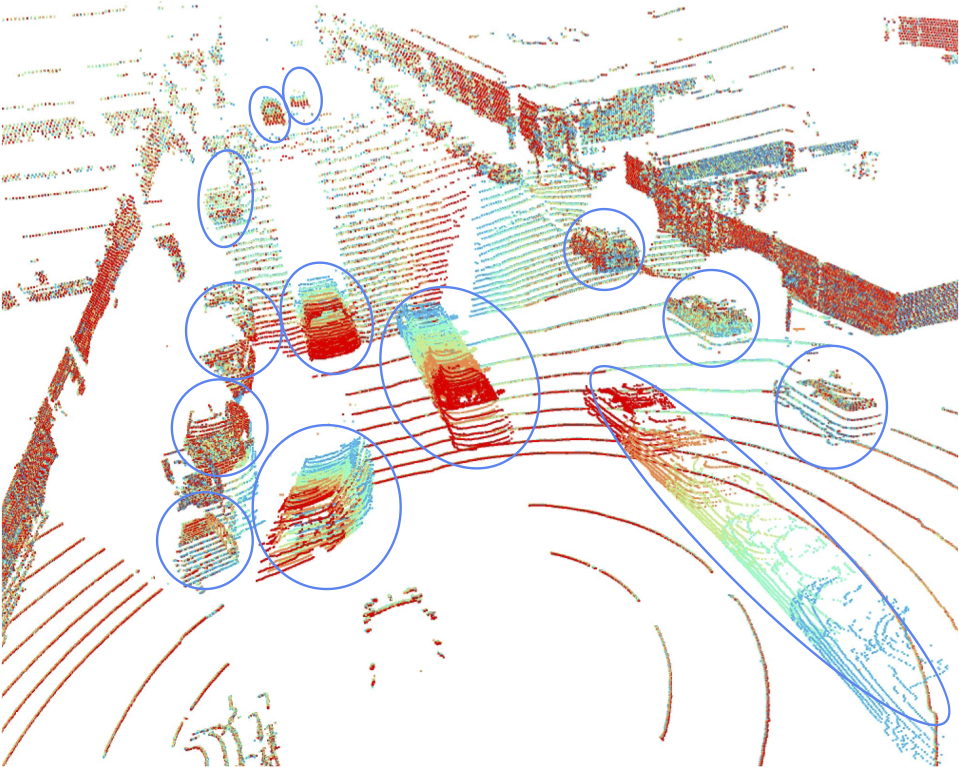
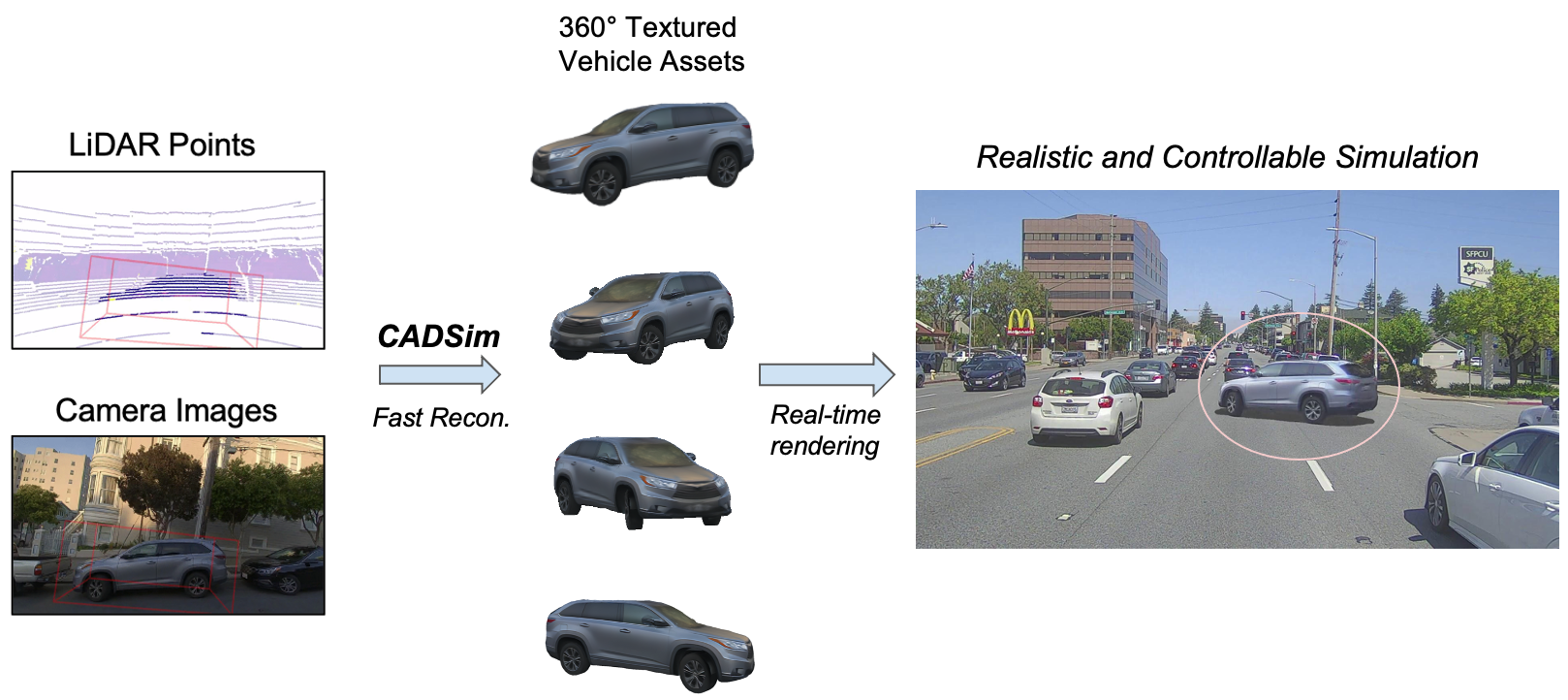
CADSim: Robust and Scalable in-the-wild 3D Reconstruction for Controllable Sensor Simulation
Jingkang Wang,
Siva Manivasagam,
Yun Chen,
Ze Yang,
Ioan Andrei Bârsan,
Anqi Joyce Yang,
Wei-chiu Ma,
Raquel Urtasun
CoRL, 2022
[Paper] [Reviews] [video]
We leverage class-specific CAD models and in-the-wild sensor data to reconstruct 3D assets with accurate geometry, photo-realistic appearance, part-aware controllability and a representation that is fast to render.
|
|
Education
University of Toronto
Jan 2021 - Present
Ph.D. Student in Computer Science, Advisor: Prof. Raquel Urtasun
University of Toronto
Sept 2019 - Jan 2021
M.Sc. in Computer Science, Advisor: Prof. Raquel Urtasun
University of Waterloo
Sept 2015 - Aug 2019
B.Sc. in Computer Science, Combinatorics and Optimization minor
|
|
Work Experience
Waabi Innovation Inc. | Toronto, ON, Canada
Mar 2021 - Present
Researcher
Full-time researcher in autonomous driving
Uber Advanced Technologies Group | Toronto, ON, Canada
Sept 2019 - Feb 2021
Research Scientist
Full-time researcher in autonomous driving, with a focus on localization and mapping systems
Pixar Animation Studios | Emeryville, CA, USA
Sept - Dec 2018
Core Engineering Intern
Built post-processing shaders for ambient occlusion, depth of field and motion blur
Uber Advanced Technologies Group | Toronto, ON, Canada
May - Aug 2018
Research Intern
Researched on attention-based matching to boost storage efficiency in localization and mapping
Google | Mountain View, CA, USA
Jan - Apr 2018
Software Engineering Intern
Key stakeholder to the successful launch of the new Google Code Jam platform
Google | Waterloo, ON, Canada
May - Aug 2017
Engineering Practicum Intern
Developed a machine learning system to classify malicious ads with hand-engineered features
Ontario Institute for Cancer Research | Toronto, ON, Canada
May - Aug 2016
Software Engineering Intern
Wrote a job-scheduler specific driver for Boutros Lab’s high performance computing interface
|
|
Academic Service
Conference and Journal Reviewer: CVPR, ECCV, ICRA, IROS, AAAI, RA-L
|
© 2021 Anqi Yang. Thanks Jon Barron for the template.
|
|