|
Machine Learning Group Computer Science University of Toronto Email: wangjk (at) cs (dot) toronto (dot) edu LinkedIn / Twitter / Google Scholar / CV |
|
|
I received my Ph.D. in Computer Science from the University of Toronto, advised by Raquel Urtasun. I was a Staff Researcher and Technical Lead Manager at Waabi, where I led the World Models and Digital Twins team. Before that, I was a Research Scientist at Uber ATG in Toronto. I earned my B.S. degree from Shanghai Jiao Tong University, where I worked with Cewu Lu and Gongshen Liu. During my undergraduate studies, I also spent a wonderful year working with Bo Li on trustworthy machine learning as a research intern. My research aims to advance world modeling and simulation to enhance physical AI safety, with a focus on self-driving vehicles. I develop scalable and generalizable 4D world simulators from constrained, noisy sensory data using neural rendering and generative AI. Our simulators bridge the gap between simulation and reality, support closed-loop testing (with hardware in the loop), and generate physically plausible counterfactuals to rigorously test and improve autonomy. My long-term goal is to build spatial intelligence into autonomous systems for safer operation in the physical world. |
|
|
|
|
| My research interest is to scale the data-driven simulation (realistic, robust, scalable, generalizable, efficient) by inferring or grounding the 3D world (graphics, physics) to ensure the safe deployment of robotic systems. |

|
Henry Che, Jingkang Wang, Yun Chen, Ze Yang, Sivabalan Manivasagam, Raquel Urtasun International Conference on Robotics and Automation (ICRA), 2026 project page / paper / bibtex |

|
Yun Chen*, Matthew Haines*, Jingkang Wang, Krzysztof Baron-Lis, Sivabalan Manivasagam, Ze Yang, Raquel Urtasun International Conference on Robotics and Automation (ICRA), 2026 project page / paper / bibtex |
|
Jingkang Wang*, Henry Che*, Yun Chen*, Ze Yang, Lily Goli, Sivabalan Manivasagam, Raquel Urtasun Advances in Neural Information Processing Systems (NeurIPS), 2025 project page / paper / bibtex |

|
Ze Yang, Jingkang Wang, Haowei Zhang, Sivabalan Manivasagam, Yun Chen, Raquel Urtasun Conference on Computer Vision and Pattern Recognition (CVPR), 2025 project page / paper / bibtex |

|
Yun Chen*, Jingkang Wang*, Ze Yang, Sivabalan Manivasagam, Raquel Urtasun European Conference on Computer Vision (ECCV), 2024 project page / paper / bibtex |

|
Ava Pun*, Gary Sun*, Jingkang Wang*, Yun Chen, Ze Yang, Sivabalan Manivasagam, Wei-Chiu Ma, Raquel Urtasun Advances in Neural Information Processing Systems (NeurIPS), 2023 project page / paper / video / 4K demo / bibtex |

|
Jay Sarva, Jingkang Wang, James Tu, Yuwen Xiong, Sivabalan Manivasagam, Raquel Urtasun Conference on Robot Learning (CoRL), 2023 project page / paper / video / poster / bibtex |

|
Sivabalan Manivasagam*, Ioan Andrei Bârsan*, Jingkang Wang, Ze Yang, Raquel Urtasun International Conference on Computer Vision (ICCV), 2023 project page / paper / video / poster / bibtex |

|
Jeffrey Liu, Yun Chen*, Ze Yang*, Jingkang Wang, Sivabalan Manivasagam, Raquel Urtasun International Conference on Computer Vision (ICCV), 2023 project page / paper / video / poster / bibtex |

|
Ze Yang*, Yun Chen*, Jingkang Wang*, Sivabalan Manivasagam*, Wei-Chiu Ma, Anqi Joyce Yang, Raquel Urtasun Conference on Computer Vision and Pattern Recognition (CVPR), 2023 (Highlight) project page / paper / video / poster / 4K demo / bibtex |

|
Yuwen Xiong, Wei-Chiu Ma, Jingkang Wang, Raquel Urtasun Conference on Computer Vision and Pattern Recognition (CVPR), 2023 project page / paper / video / poster / bibtex |

|
Ze Yang, Sivabalan Manivasagam, Yun Chen, Jingkang Wang, Rui Hu, Raquel Urtasun International Conference on Robotics and Automation (ICRA), 2023 project page / video / poster / bibtex |

|
Jingkang Wang, Sivabalan Manivasagam, Yun Chen, Ze Yang, Ioan Andrei Bârsan, Anqi Joyce Yang, Wei-Chiu Ma, Raquel Urtasun Conference on Robot Learning (CoRL), 2022 project page / paper / video / bibtex |

|
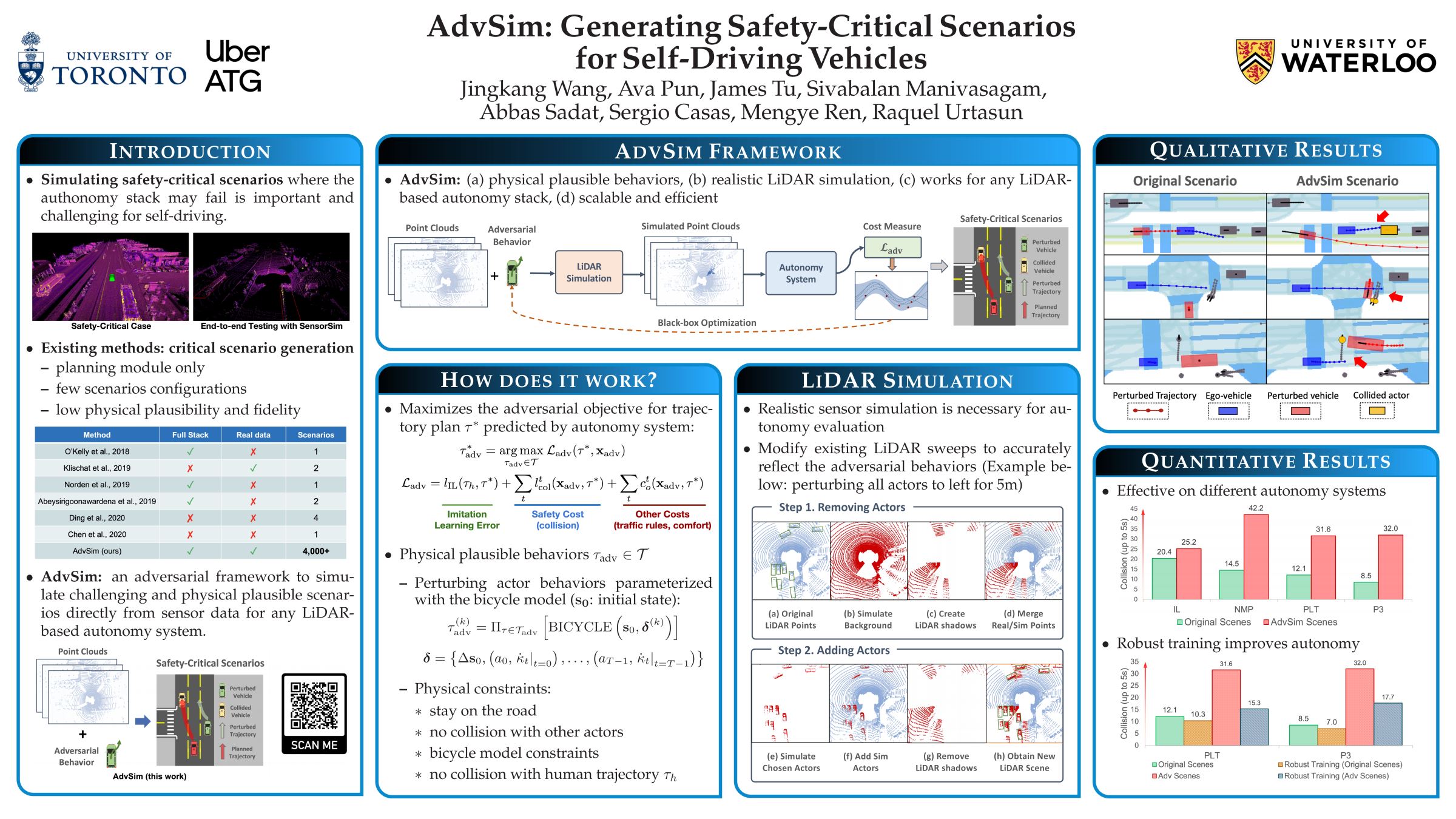
Jingkang Wang, Ava Pun, James Tu, Sivabalan Manivasagam, Abbas Sadat, Sergio Casas, Mengye Ren, Raquel Urtasun Conference on Computer Vision and Pattern Recognition (CVPR), 2021 project page / paper / poster / video / bibtex |

|
Sean Segal*, Nishanth Kumar*, Sergio Casas, Wenyuan Zeng, Mengye Ren, Jingkang Wang, Raquel Urtasun Conference on Robot Learning (CoRL), 2021 paper / poster / bibtex |

|
James Tu*, Tsunhsuan Wang*, Jingkang Wang, Sivabalan Manivasagam, Mengye Ren, Raquel Urtasun International Conference on Computer Vision (ICCV), 2021 paper / video / bibtex |

|
Jingkang Wang*, Hongyi Guo*, Zhaowei Zhu*, Yang Liu Advances in Neural Information Processing Systems (NeurIPS), 2021 project page / paper / code / poster / bibtex |

|
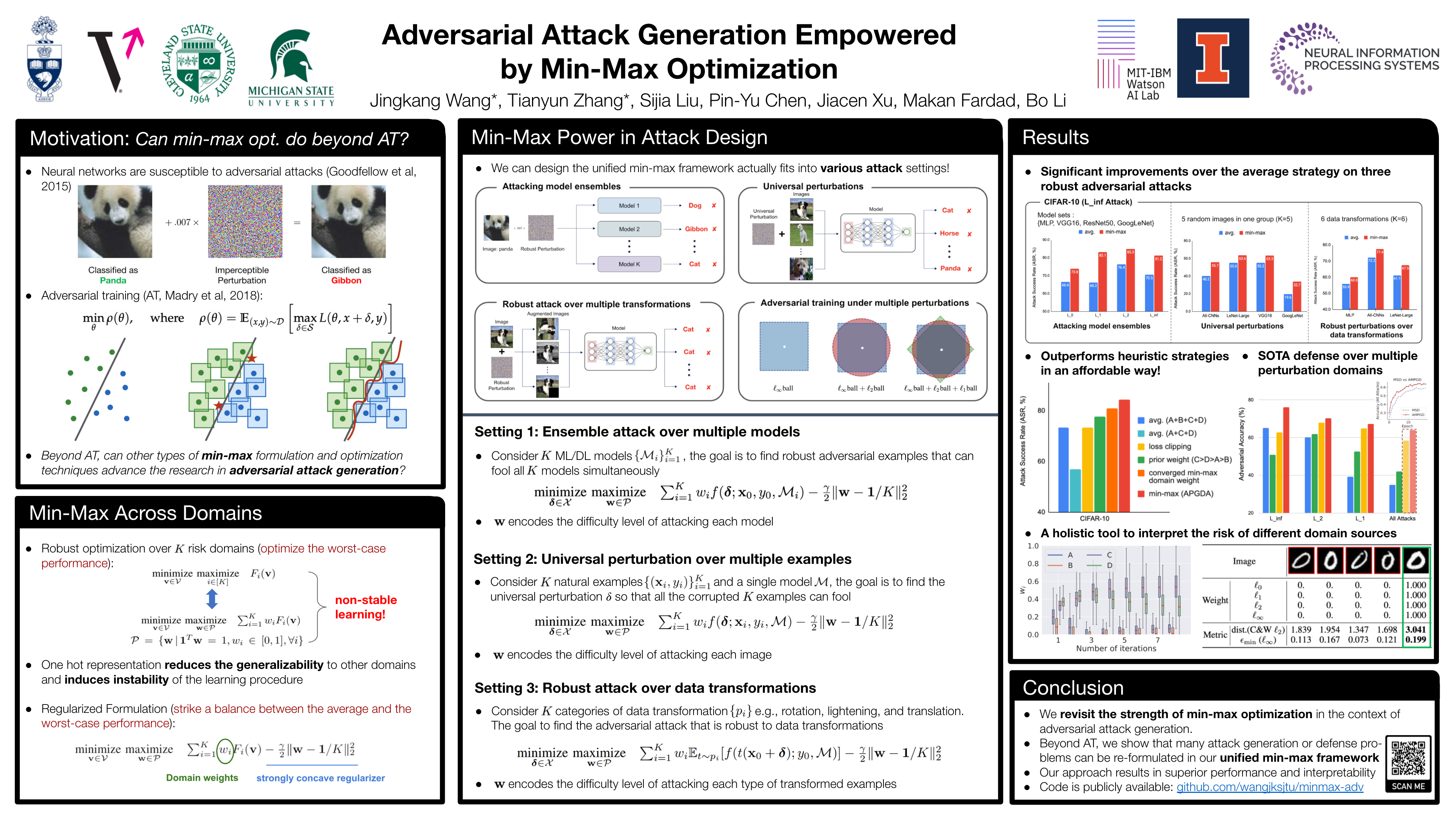
Jingkang Wang*, Tianyun Zhang*, Sijia Liu, Pin-Yu Chen, Jiacen Xu, Makan Fardad, Bo Li Advances in Neural Information Processing Systems (NeurIPS), 2021 project page / paper / code / poster / bibtex |

|
Nicholas Vadivelu, Mengye Ren, James Tu, Jingkang Wang, Raquel Urtasun Conference on Robot Learning (CoRL), 2020 paper / video / bibtex |

|
Jingkang Wang*, Mengye Ren*, Ilija Bogunovic, Yuwen Xiong, Raquel Urtasun International Conference on Machine Learning (ICML), RealML Workshop, 2020 paper / video / bibtex |

|
Tianshi Cao*, Jingkang Wang*, Annie Zhang*, Sivabalan Manivasagam* International Conference on Learning Representations (ICLR), BeTR-RL Workshop, 2020 paper / code / media / bibtex |

|
Jingkang Wang, Yang Liu, Bo Li AAAI Conference on Artificial Intelligence (AAAI), 2020 (Spotlight) paper / code / bibtex |

|
Jingkang Wang*, Jianing Zhou*, Jie Zhou, Gongshen Liu Annual Meeting of the Association for Computational Linguistics (ACL), Student Research Workshop, 2019 paper / code / bibtex |

|
Yiping Chen*, Jingkang Wang*, Jonathan Li, Cewu Lu, Zhipeng Luo, Han Xue, Cheng Wang Conference on Computer Vision and Pattern Recognition (CVPR), 2018 project page / paper / code / bibtex |
|
|
Jingkang Wang*, Henry Che*, Yun Chen*, Ze Yang, Lily Goli, Sivabalan Manivasagam, Raquel Urtasun Advances in Neural Information Processing Systems (NeurIPS), 2025 project page / paper / bibtex |
|
|
Ze Yang, Jingkang Wang, Haowei Zhang, Sivabalan Manivasagam, Yun Chen, Raquel Urtasun Conference on Computer Vision and Pattern Recognition (CVPR), 2025 project page / paper / bibtex |
|
|
Yun Chen*, Jingkang Wang*, Ze Yang, Sivabalan Manivasagam, Raquel Urtasun European Conference on Computer Vision (ECCV), 2024 project page / paper / bibtex |
|
|
Sivabalan Manivasagam*, Ioan Andrei Bârsan*, Jingkang Wang, Ze Yang, Raquel Urtasun International Conference on Computer Vision (ICCV), 2023 project page / paper / video / poster / bibtex |
|
|
Ava Pun*, Gary Sun*, Jingkang Wang*, Yun Chen, Ze Yang, Sivabalan Manivasagam, Wei-Chiu Ma, Raquel Urtasun Advances in Neural Information Processing Systems (NeurIPS), 2023 project page / paper / video / 4K demo / bibtex |
|
|
Ze Yang*, Yun Chen*, Jingkang Wang*, Sivabalan Manivasagam*, Wei-Chiu Ma, Anqi Joyce Yang, Raquel Urtasun Conference on Computer Vision and Pattern Recognition (CVPR), 2023 (Highlight) project page / paper / video / poster / 4K demo / bibtex |
|
|
Jingkang Wang, Sivabalan Manivasagam, Yun Chen, Ze Yang, Ioan Andrei Bârsan, Anqi Joyce Yang, Wei-Chiu Ma, Raquel Urtasun Conference on Robot Learning (CoRL), 2022 project page / paper / video / bibtex |
|
|
Jingkang Wang, Ava Pun, James Tu, Sivabalan Manivasagam, Abbas Sadat, Sergio Casas, Mengye Ren, Raquel Urtasun Conference on Computer Vision and Pattern Recognition (CVPR), 2021 project page / paper / poster / video / bibtex |
{kind=link}
{kind=link}
|
|
|
|

|
|
|

|
|
|

|
|
|
|
|
Ava Pun (Undergrad, UWaterloo)
neural lighting simulation and inverse rendering, now PhD at CMU. |
|
|
|
|
|
Last update: March, 2026.
|