|
I am a PhD student under the Department of Computer Science at the University of Toronto, advised by Prof. Raquel Urtasun. Meanwhile, I am a staff research scientist and a tech lead manager at Waabi leading the perception and prediction team. I earned my B.A.Sc in Engineering Science from University of Toronto, majoring in Robotics Engineering and minoring in Artificial Intelligence . What I value the most is creativity and productivity. Email / CV / Google Scholar / Github / LinkedIn |

|
|
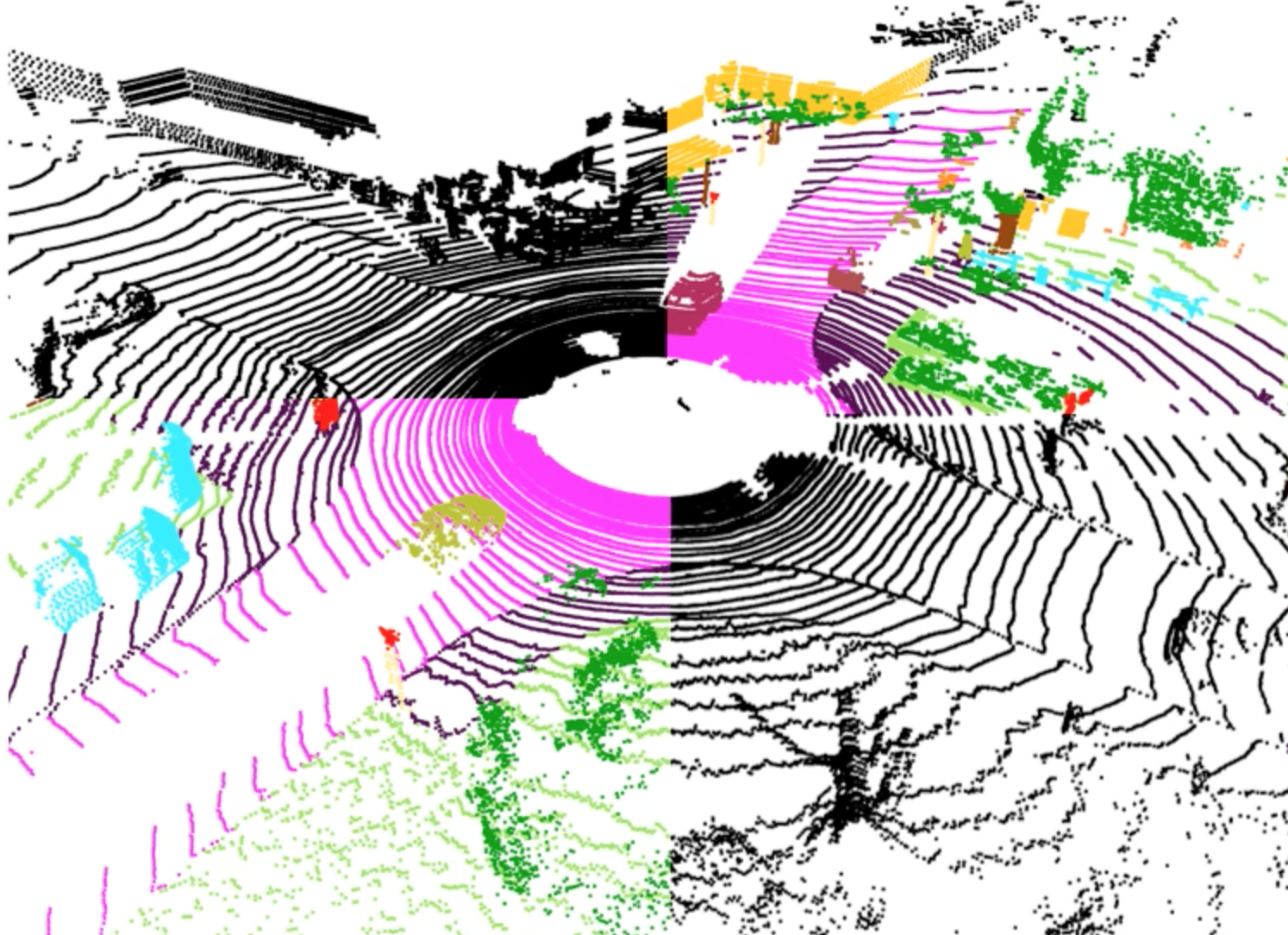
I'm interested in computer vision, machine learning, and robotics. Much of my research is about 3D perception with LiDAR point clouds. |
|
Ali Athar*, Enxu Li*, Sergio Casas, Raquel Urtasun Conference on Robot Learning (CoRL), 2023 | Atlanta (GA), USA bibtex / website / PDF / arXiv |
|
Enxu Li, Sergio Casas, Raquel Urtasun IEEE International Conference on Computer Vision (ICCV), 2023 | Paris, France bibtex / website / PDF / arXiv |
|
Enxu Li*, Ryan Razani*, Yixuan Xu, Bingbing Liu IEEE International Conference on Robotics and Automation (ICRA) ,2023 | London, UK bibtex / PDF / arXiv |

|
Chengnan Shentu*, Enxu Li*, Chaojun Chen, Puspita Triana Dewi, David Lindell, Jessica Burgner-Kahrs IEEE Robotics and Automation Letters (RA-L) at RoboSoft 2024 | San Diego (CA), USA arXiv |
|
Enxu Li*, Ryan Razani*, Yixuan Xu, Bingbing Liu IEEE International Conference on Robotics and Automation (ICRA) ,2022 | Philadelphia (PA), USA bibtex / PDF / arXiv |
|
Ryan Razani*, Ran Cheng*, Enxu Li, Ehsan Taghavi, Yuan Ren, Bingbing Liu IEEE International Conference on Computer Vision (ICCV), 2021 | virtual bibtex / PDF / arXiv |
|
Ran Cheng, Ryan Razani, Ehsan Taghavi, Enxu Li, Bingbing Liu IEEE Conference on Computer Vision and Pattern Recognition (CVPR),2021 | virtual bibtex / PDF / arXiv |
|
|
|
|

|
Department of Computer Science, University of Toronto Sep 2022 - Present | Toronto, ON GPA: 4.00/4.00 Supervisor: Prof. Raquel Urtasun
|
|
|
Faculty of Applied Science and Engineering, University of Toronto Sep 2017 - Apr 2022 | Toronto, ON Major GPA: 3.99/4.00, cGPA: 3.87/4.00 W. S. Wilson Medal [top graduating Engineering Science student], 2022 Daisy Intelligence Scholarship [top Robotics Engineering student], 2020 NSERC Undergraduate Research Award, 2019 U of T Scholar, 2017 Dean's Honour List - 2017-2022 |
|
|

|
Staff Research Scientist Waabi Innovation Inc.Aug 2022 - Present | Toronto, ON Research and development for autonomous trucking. Focused topic: 3D perception, semantic segmentation, sensor fusion. |
|
|
|
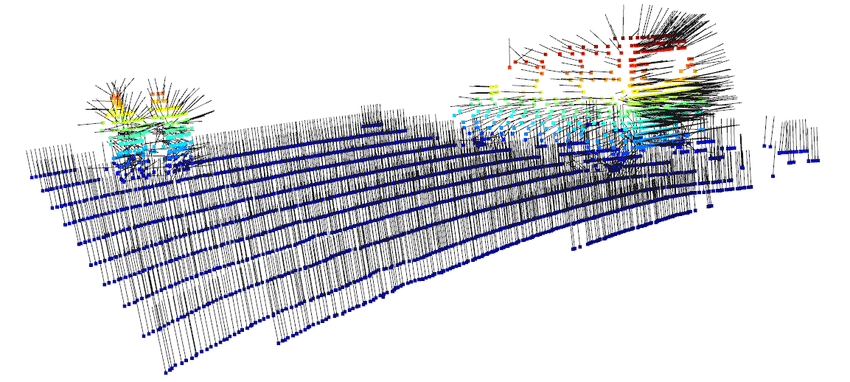
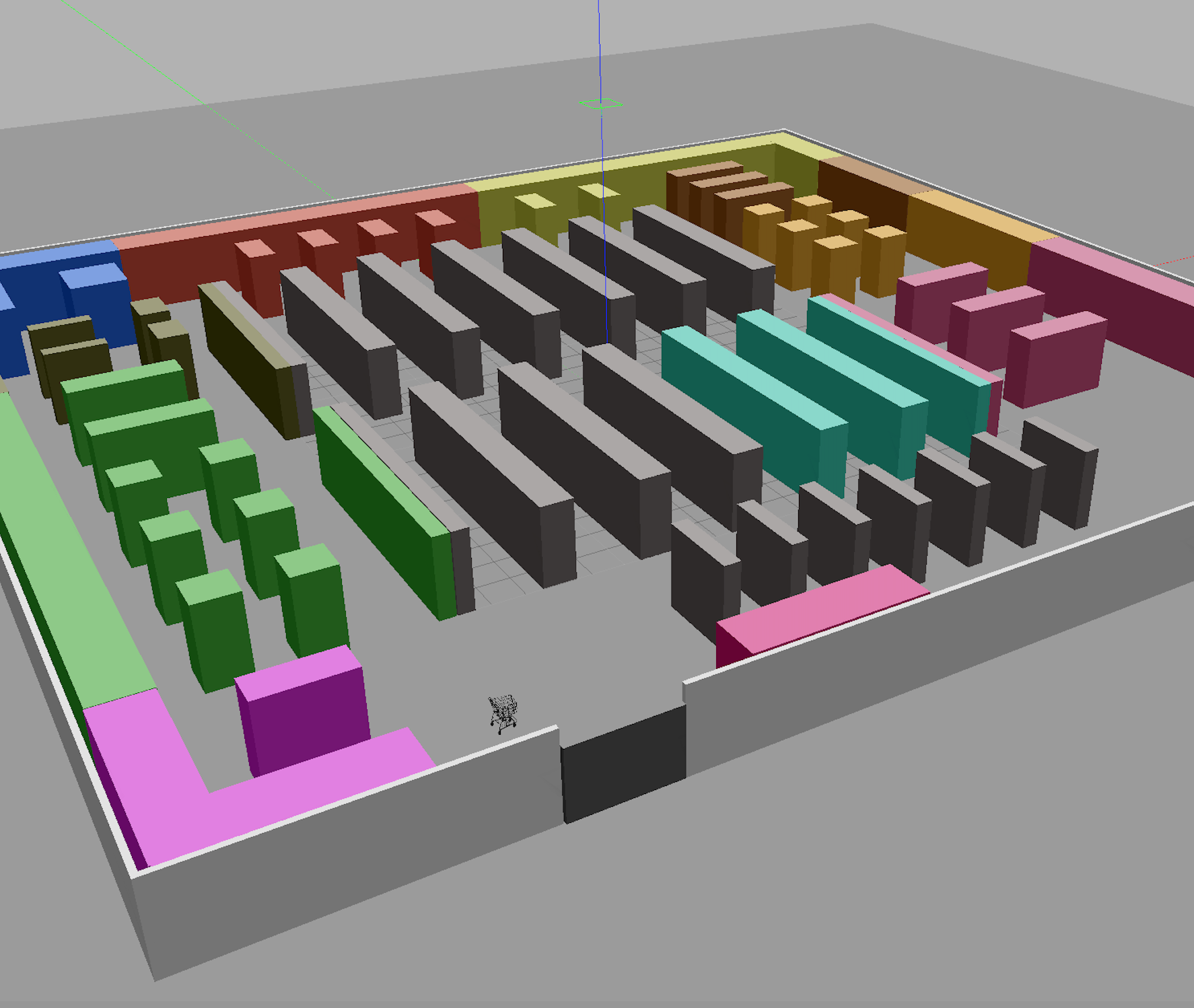
RoboKart: An Intelligent Robotic Shopping Cart Robotics Capstone Project, University of Toronto, Apr 2022Technical Report / Presentation Desgined RoboKart that can provide a complete robotic shopping experience for supermarket and grocery customers and evaluated its functionalities in Gazebo simulation environment. |
|
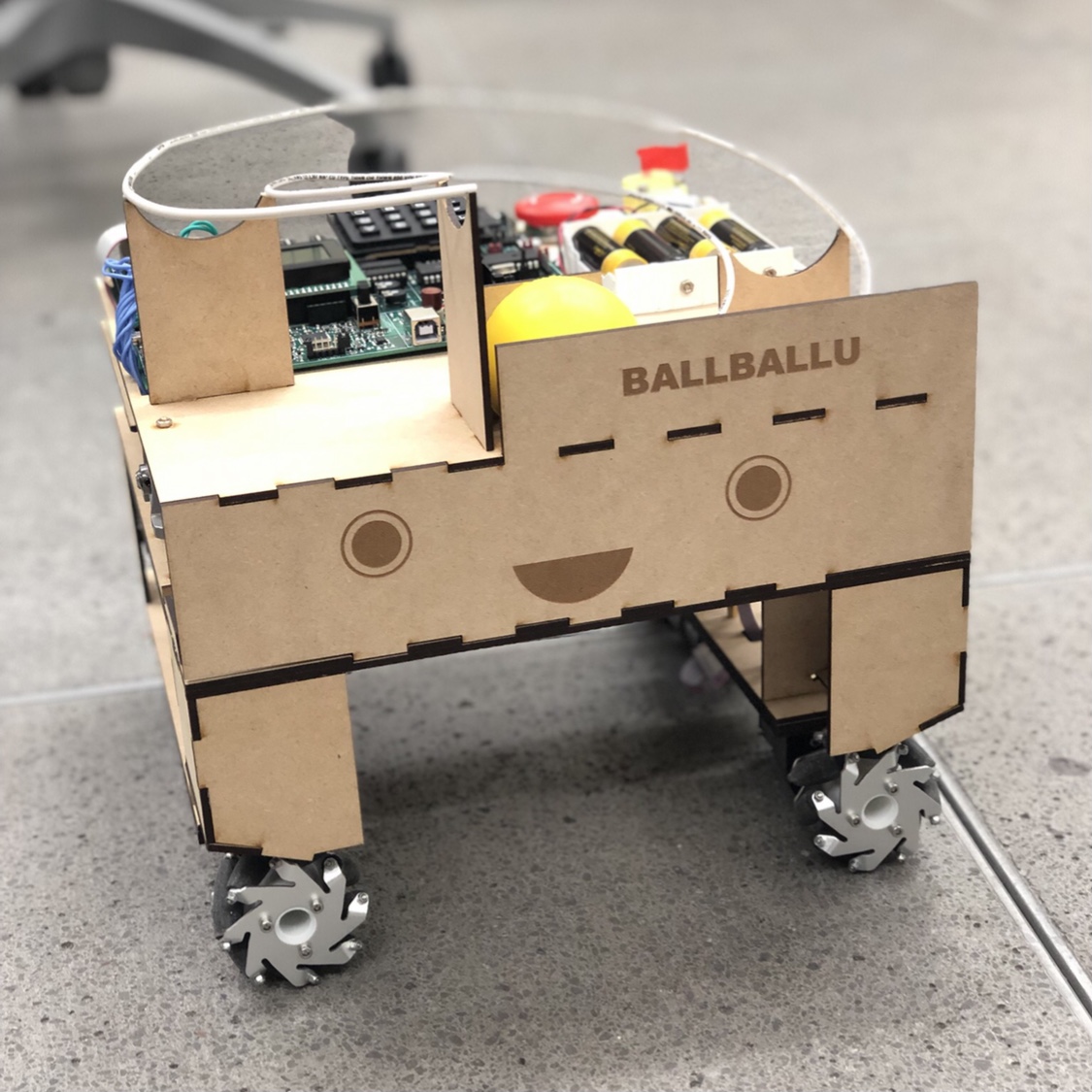
BALL BALL U: An Autonmous Ball Dispensing Prototype Engineering Design Competition 2nd Place, University of Toronto, Apr 2019Technical Report / Glance / Competition Designed, fabricated and programmed a proof-of-concept robot prototype that autonomously detect and deploy objects to canisters. |