|
I am a PhD candidate with the Department of Computer Science at the University of Toronto, advised by Prof. Jessica Burgner-Kahrs. I hold a B.A.Sc in Engineering Science at the University of Toronto, majoring in Robotics Engineering with a minor in Artificial Intelligence. As a full-stack roboticist, I work on tendon-driven continuum robots, soft elastic machines that can navigate confined spaces like jet engines, surgical cavities, and pipes. My goal is to build continuum robots capable of intelligent, contact-rich interactions (manipulation, locomotion, and human collaboration) by closing the loop between dynamics modeling, planning and control, and systems design. / CV / Google Scholar / LinkedIn |

|
|
|
project website / arxiv |
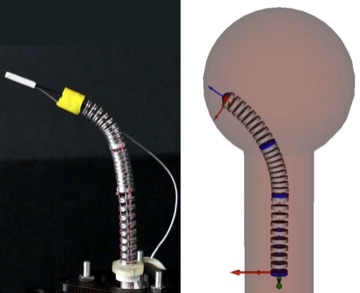
Chengnan Shentu, Nicholas Baldassini, Tongjia Zheng, Priyanka Rao, Jessica Burgner-Kahrs Under Review Do rigid-body simulators dream of soft robots? We show that tendon-driven continuum robots can live surprisingly well inside MuJoCo, as long as the discretization respects the underlying mechanics. The result is a simulator that keeps the good robot-learning stuff: contact, actuation, dynamics, and policy training, without entirely pretending the soft robot is just a bendy pile of rigid parts. We validate it against continuum-mechanics references and hardware, then send policies trained in simulation straight onto a real continuum robot to do contact-rich manipulation. |
project website / arxiv |
Chengnan Shentu*, Nicholas Baldassini*, Oluwagbotemi D. Iseoluwa, Radian Gondokaryono, Jessica Burgner-Kahrs RSS, 2026 *Equal contribution Can a snake robot autonomously thread its body through tight spaces? Our sampling-based planner does follow-the-leader motion for continuum robots mounted on general manipulators, computing the base pose with a closed-form geometric trick instead of slow online optimization, with a resolution completeness guarantee. |
preprint |
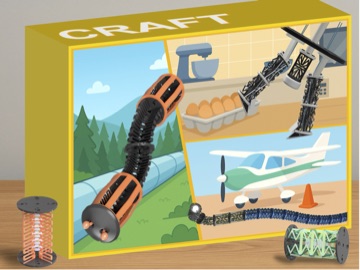
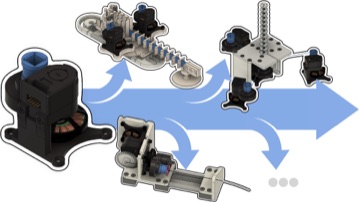
Puspita Triana Dewi, Chloe Pogue, Chengnan Shentu, Andrea Gotelli, Jessica Burgner-Kahrs Under Review Need a robot that inspects airplane wings in the morning and cracks eggs in the afternoon? CRAFT is a modular library of snap-together 3D-printed modules that lets you quickly reconfigure a continuum robot's stiffness and shape for different tasks — no redesign required. |
PDF / IEEE Xplore / Video |
Kyum Lee, Chengnan Shentu, Chloe Pogue, Jessica Burgner-Kahrs ICRA, 2025 Running a tendon-driven continuum robot without tension calibration is like playing a guitar that's out of tune. We automate tension calibration with a low-cost method that achieves repeatable results even without dedicated tension sensors, enabling more consistent teleoperation. |
website / PDF / arXiv |
Maximillian Hachen, Chengnan Shentu, Sven Lilge, Jessica Burgner-Kahrs IEEE RA-L, 2025 A surgical robot that bumps into the walls of a cavity isn't very useful. Our nonlinear model predictive controller steers a continuum robot's tip between targets while keeping the entire body within a user-defined safe zone. |
website / PDF / arXiv |
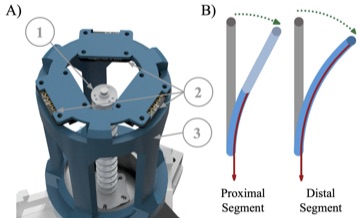
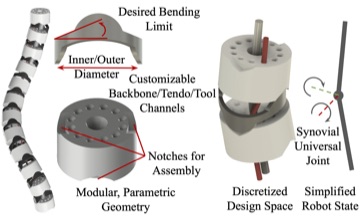
Chengnan Shentu, Jessica Burgner-Kahrs ICRA@40, 2024 What if we rethought tendon-driven continuum robot design beyond the conventional parallel-tendon backbone? Our universal-jointed continuum robot design provides torsional stiffness with a compact, parametric geometry that auto-adapts to tube dimensions and desired joint angle limits. |

PDF / arXiv / IEEE Xplore / GitHub |
Chengnan Shentu*, Enxu Li*, Chaojun Chen, Puspita Triana Dewi, David B. Lindell, Jessica Burgner-Kahrs IEEE RA-L, 2023 *Equal contribution Most shape-sensing setups need a second camera or wires running through the robot — what if a single photo was enough? MoSSNet recovers a continuum robot's full 3D shape from one RGB image in real time, matching or exceeding stereo-vision accuracy with far simpler hardware. |
PDF / arXiv(html) / Frontiers / Youtube / OpenCR Project |
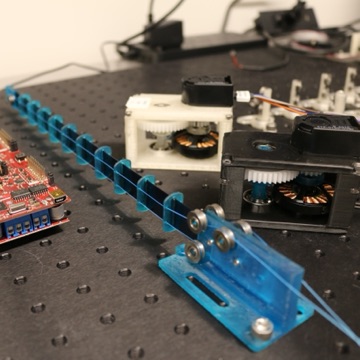
Reinhard M. Grassmann, Chengnan Shentu, Taqieldin Hamoda, Puspita Triana Dewi, Jessica Burgner-Kahrs Frontiers in Robotics and AI, 2024 Building your first continuum robot shouldn't require reinventing the actuator. We open-source a single, torque-controlled actuation module — with full software and hardware designs — that can drive a wide range of continuum robots. |
Show all research projects
|
Undergraduate Thesis, supervised by Jessica Burgner-Kahrs Sep 2021 - Apr 2022 In this work, I investigated and implemented an impedance controller for a planar continuum robot in simulation, to achieve variable dynamic behavior for safe interactions with the environment. |
|
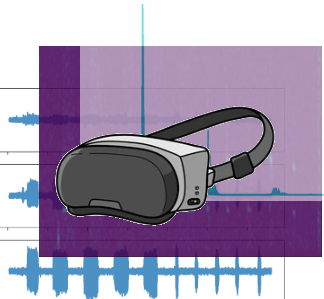
Supervised by Prof. Xin Yi, Tsinghua University May - Sep, 2021 This work seeks to investigate the risk of side channel attack on head mounted consumer devices, such as VR headsets and smart-glasses, through inertial measurement unit (IMU) by recovering speech or motion information. I identified several machine learning models that could eavesdrop on device userswithout microphone access and discussed how to defend such attacks effectively. |

|
Supervised by Prof. Peter Grant, University of Toronto Institute for Aerospace Studies May - Aug, 2019 This project is motivatedby aircraft stall being one of the leading causes of commercial aircraft accidents. The outcome is an improved aircraft flight model suitable for professional simulation training. |
|
|
|
|
|
Department of Computer Science, University of Toronto Sep 2022 - Current | Toronto, ON, Canada Supervisor: Prof. Jessica Burgner-Kahrs UofT Robotics Institute Fellow, 2025 - 2026 Ontario Graduate Scholarship, 2025 - 2026 |
|
|
Faculty of Applied Science and Engineering, University of Toronto Sep 2017 - Apr 2022 | Toronto, ON, Canada The Engineering Science Research Opportunities Program Scholarship, 2019 Dean's Honour List, 2017-2022 |
Other Projects

|
Autonomous Vehicle Control
University of Toronto Self-Driving Car Team 1st Place among 8 Universities, AutoDrive Challenge, 2021 Development of velocity scheduler and model predictive controller with dynamic vehicle model using C++ in ROS |
|
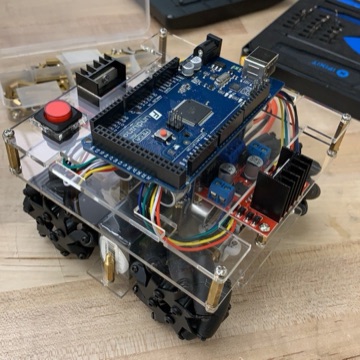
University of Toronto Robotics Association Competition Organized and led weekly meetings with subteam members focusing on the design and implementation of mechatronics for the autonomous robot. |
|
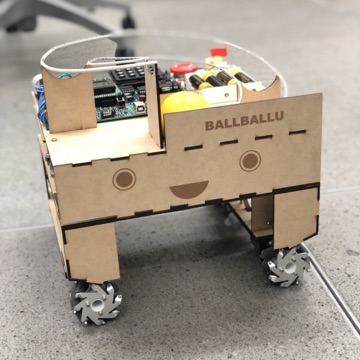
BALL BALL U: An Autonmous Ball Dispensing Prototype Engineering Design Competition 2nd Place, University of Toronto, Apr 2019Technical Report / Glance / Competition Designed, fabricated and programmed a proof-of-concept robot prototype that autonomously detect and deploy objects to canisters. |