|
I am a PhD student at the University of Toronto and the Vector Institute, where I work on machine learning and self-driving cars. My advisor is Raquel Urtasun. Previously, I was a research scientist at Uber Advanced Technologies Group. I earned my MSc from the University of Toronto, my BCS from the University of Waterloo, and my BBA from Wilfrid Laurier University. During my undergrad, I was fortunate to have worked with Will Evans and Peter van Beek. Email / Google Scholar / LinkedIn / Twitter |

|
|
|
|
|
Shuhan Tan*, Kelvin Wong*, Shenlong Wang, Sivabalan Manivasagam, Mengye Ren, Raquel Urtasun Computer Vision and Pattern Recognition (CVPR), 2021 An autoregressive model of traffic scenes. |
|
Min Bai, Shenlong Wang, Kelvin Wong, Ersin Yumer, Raquel Urtasun arXiv, 2021 Spatio-temporal segmentation of construction zones. |
|
Sourav Biswas, Jerry Liu, Kelvin Wong, Shenlong Wang, Raquel Urtasun Neural Information Processing Systems (NeurIPS), 2020 Multi-sweep LiDAR compression using deep entropy models. |
|
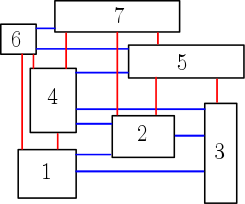
Ben Chugg, Will Evans, Kelvin Wong Computational Geometry: Theory and Applications, 2021 Canadian Conference on Computational Geometry (CCCG), 2020 Visualize pairs of undirected graphs simulatenously. |
|
Kelvin Wong*, Qiang Zhang*, Ming Liang, Bin Yang, Renjie Liao, Abbas Sadat, Raquel Urtasun European Conference on Computer Vision (ECCV), 2020 Test motion planning using simulated perception and prediction outputs. |
|
|
Lila Huang, Shenlong Wang, Kelvin Wong, Jerry Liu, Raquel Urtasun Computer Vision and Pattern Recognition (CVPR), 2020 (Oral) Single-sweep LiDAR compression using deep entropy models. |
|
Sivabalan Manivasagam, Shenlong Wang, Kelvin Wong, Wenyuan Zeng, Mikita Sazanovich, Wei-Chiu Ma, Raquel Urtasun Computer Vision and Pattern Recognition (CVPR), 2020 (Oral) Realistic LiDAR simulation for self-driving vehicles. |
|
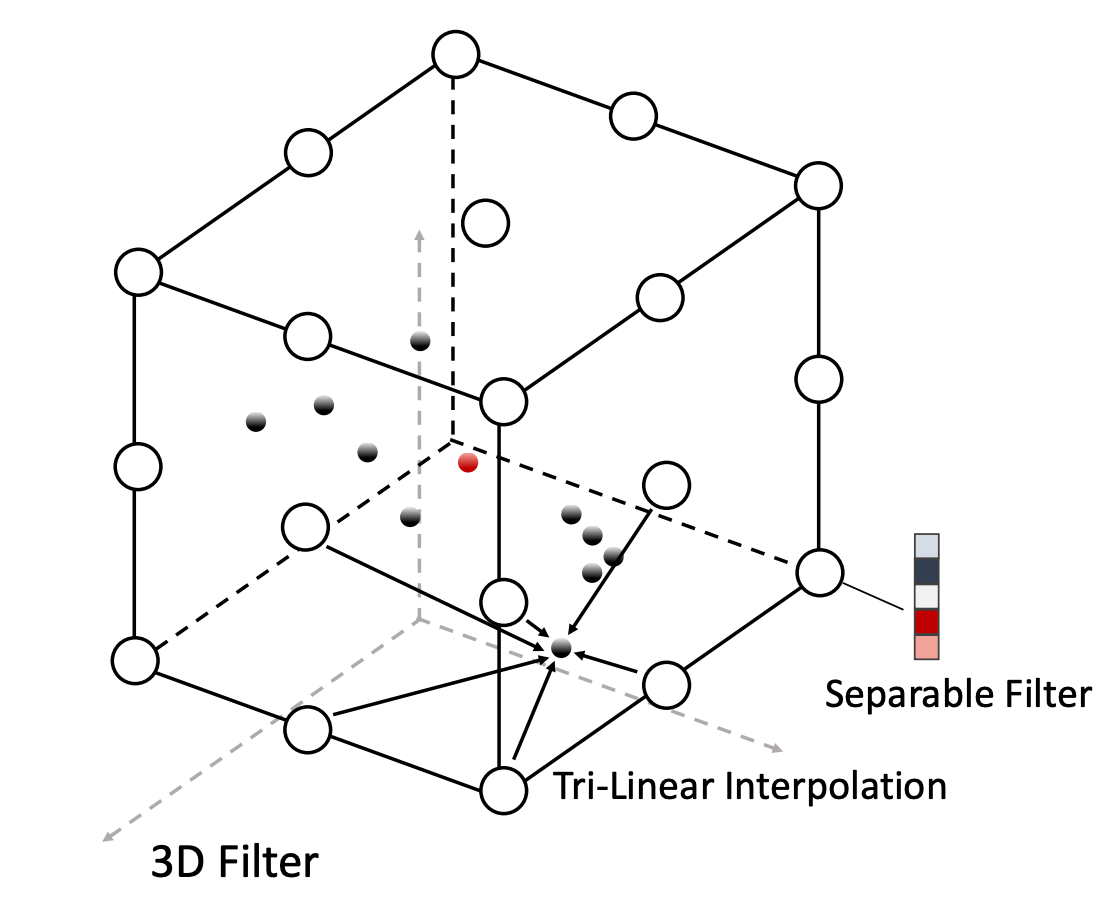
Yuwen Xiong*, Mengye Ren*, Renjie Liao, Kelvin Wong, Raquel Urtasun NeurIPS Workshop on Sets and Partitions, 2019 Deformable convolution for 3D point clouds. |
|
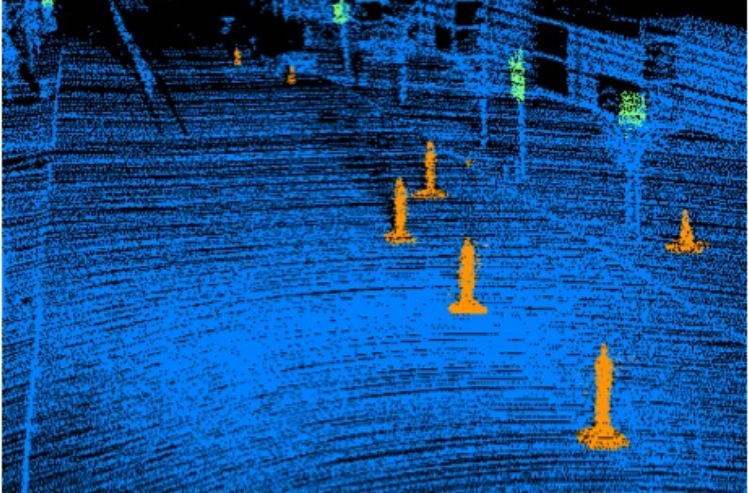
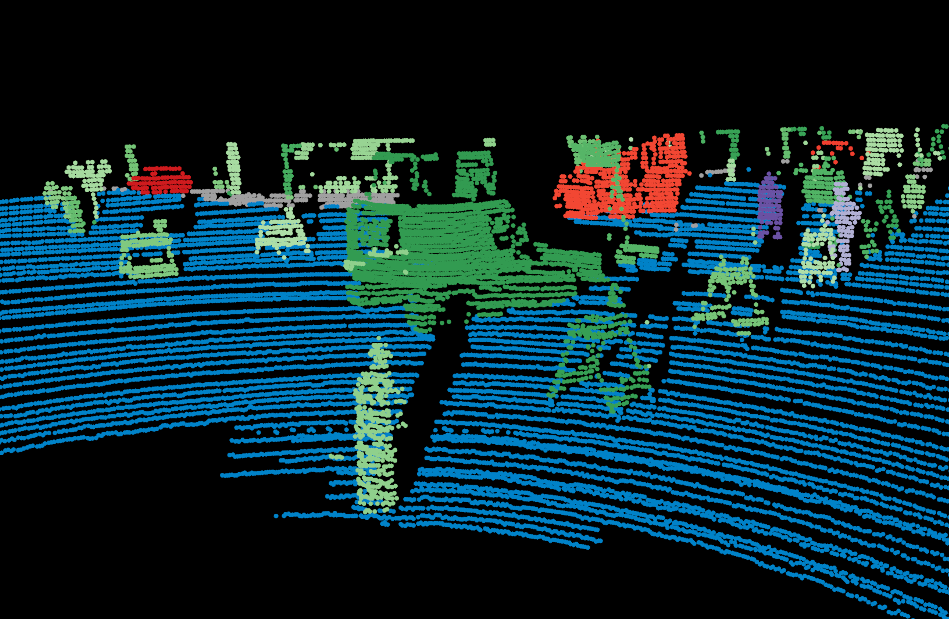
Kelvin Wong, Shenlong Wang, Mengye Ren, Ming Liang, Raquel Urtasun Conference on Robot Learning (CoRL), 2019 (Spotlight) 3D perception for the open-set world. |
|
Conference Reviewer: AAAI 2021, CVPR 2021 |
|
Website shamelessly copied from Jon Barron. |