|
|
Overview of Research
My early research was on numerical techniques for singularity and bifurcation analysis. Since the mid to late 1980s I have focused on computer vision, which is the study of how computers can begin to understand images and videos.
My recent research has been on several sub-topics within computer vision, a few highlights of which are listed below.
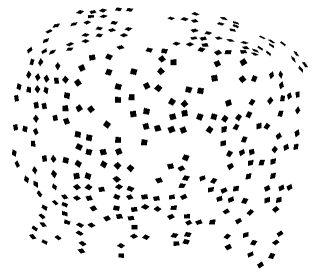
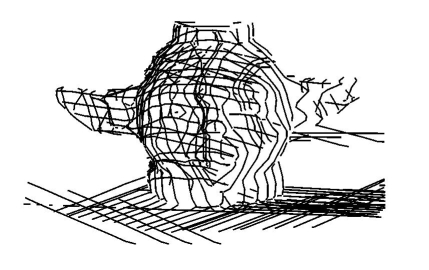
- The estimation of the 3D shape of surfaces in the scene from various image cues, including image motion, shading, contour, and texture.
- Image motion estimation and tracking.
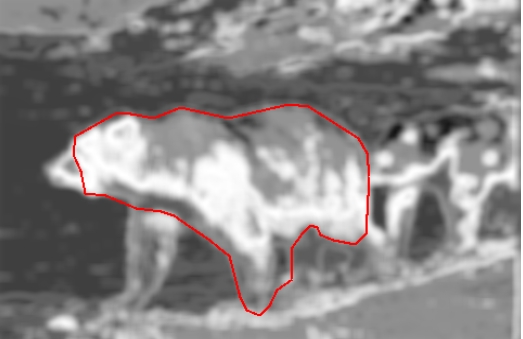
- The segmentation or grouping of image information into coherent parts.
- Assembling image tokens into simple scene descriptions.
More details on these recent projects can be found by using the menu to the left, or the links in the table below.
| Non-Rigid Structure from Motion |
|
Introduction:
Non-Rigid Structure from Motion
Publication: Jonathan Taylor, Allan D. Jepson and Kiriakos N. Kutulakos, Non-Rigid Structure from Locally-Rigid Motion, Proc. Computer Vision and Pattern Recognition Conf., San Francisco, CA, 2010. PDF (5070KB)
Project Page: Non-Rigid Structure from Locally-Rigid Motion
|
|
| Shape from Shading |
|
Introduction:
Shape from Shading
Publication: Ady Ecker and A.D. Jepson, Polynomial Shape from Shading,
Computer Vision and Pattern Recognition (CVPR), San Francisco, USA, June 2010. PDF (5280KB)
|
|
| Benchmarking Image Segmentation |
|
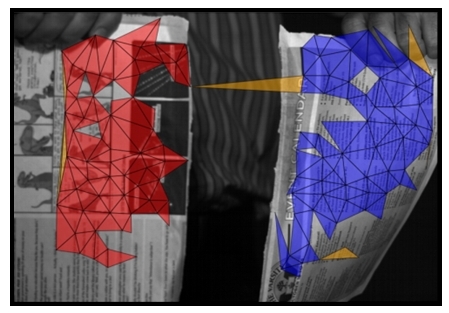
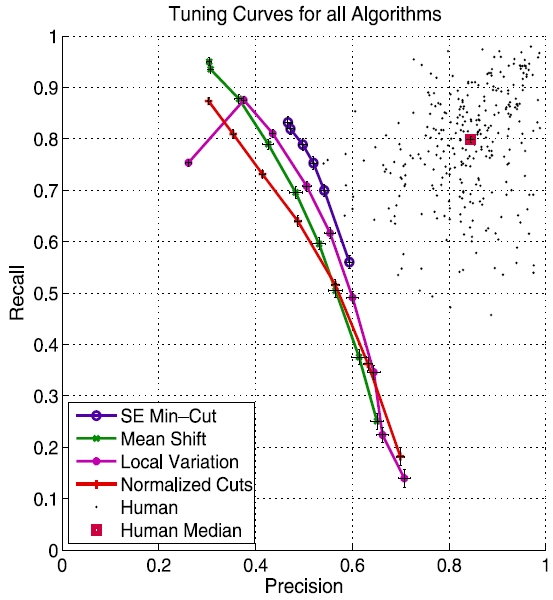
Introduction:
Image Segmentation
Publication: Francisco J. Estrada and Allan D. Jepson, Benchmarking Image Segmentation Algorithms, Int. J. Computer Vision, Vol. 85, No. 2, 2009, pp.167-181. PDF (1306KB)
|
|
| Shape from Texture |
|
Introduction:
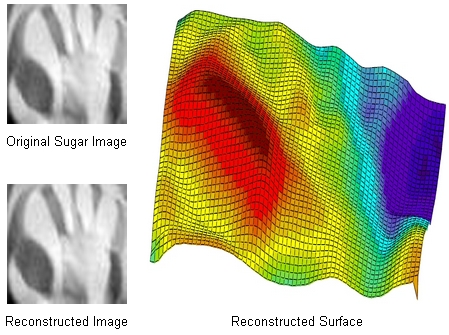
Shape from Texture
Publication: Ady Ecker, Allan D. Jepson, and Kiriakos N. Kutulakos, Semidefinite programming heuristics for surface reconstruction ambiguities,
European Conference on Computer Vision (ECCV), Marseille, France, October 2008. PDF (2391KB)
|
|
| Shape from Planar Contours |
|
Introduction:
Shape from Planar Contours
Publication: Ady Ecker, Kiriakos N. Kutulakos and Allan D. Jepson,
Shape from Planar Curves: A Linear Escape from Flatland
Computer Vision and Pattern Recognition (CVPR), Minneapolis, USA, June 2007.
PDF (855KB)
|
|
| Contour Grouping |
|
Introduction:
Contour Grouping
Publication: Francisco J. Estrada and A. D. Jepson, Robust Boundary Detection With Adaptive Grouping, 5th IEEE Workshop on Perceptual Organization in Computer Vision, NY, USA, 2006.
PDF (1339KB)
|
|
| Image Segmentation |

|
Introduction:
Image Segmentation
Publication: Francisco J. Estrada, A.D. Jepson and C. Chennubhotla, Spectral Embedding and Min-Cut for Image Segmentation, British Machine Vision Conference, London, U. K., 2004. PDF (1371KB)
|
|
Jump to Top of Research Overview.
|