TrafficSim: Learning to Simulate Realistic Multi-Agent Behaviors
Abstract
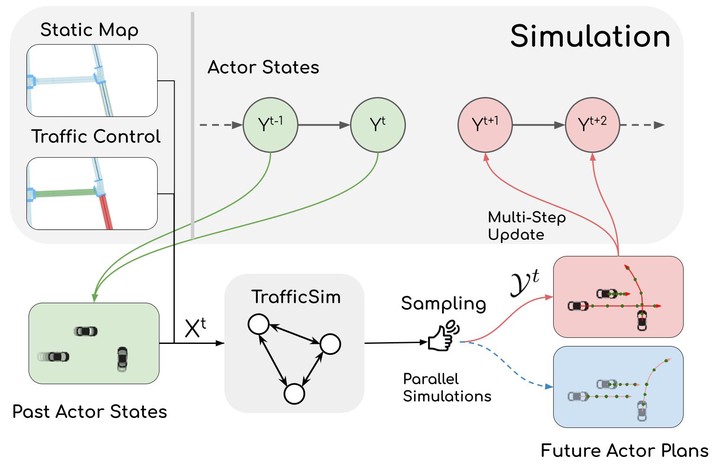
Simulation has the potential to massively scale evaluation of self-driving systems enabling rapid development as well as safe deployment. To close the gap between simulation and the real world, we need to simulate realistic multi-agent behaviors. Existing simulation environments rely on heuristic-based models that directly encode traffic rules, which cannot capture irregular maneuvers (e.g., nudging, U-turns) and complex interactions (e.g., yielding, merging). In contrast, we leverage real-world data to learn directly from human demonstration and thus capture a more diverse set of actor behaviors. To this end, we propose TrafficSim, a multi-agent behavior model for realistic traffic simulation. In particular, we leverage an implicit latent variable model to parameterize a joint actor policy that generates socially-consistent plans for all actors in the scene jointly. To learn a robust policy amenable for long horizon simulation, we unroll the policy in training and optimize through the fully differentiable simulation across time. Our learning objective incorporates both human demonstrations as well as common sense. We show TrafficSim generates significantly more realistic and diverse traffic scenarios as compared to a diverse set of baselines. Notably, we can exploit trajectories generated by TrafficSim as effective data augmentation for training better motion planner.