
The emergence of ‘collaborative robots’ promises to transform the manufacturing sector, enabling humans and robots to work together in shared spaces and physically interact to maximise the benefits of both manual and robotic processes. Whereas traditional, non-collaborative, processes rely on segregation of robots and workers to ensure safety, collaborative working introduces complex challenges around the monitoring and control of systems and processes; where people and robots operate in shared environments, and where physical interaction is a possibility, it becomes much harder to guard against potential hazards. Additional safety considerations are therefore required before robots can be deployed alongside people in industrial processes.
The CSI:Cobot project focuses on a complex industrial case study involving a mobile collaborative manipulator, i.e. iAM-R. These types of robots are generating increasing interest in industry in areas including machine tending, logistics, drug discovery, social care, and remote working. Our proposed case study relates to the former, and is supported by platform manufacturers, systems integrators, distributors, and end-users. The iAM-R is a mobile collaborative robot built on the MiR200 mobile robot base, and carrying a 3kg, 5kg, or 10kg 6-axis Universal Robot collaborative manipulator (the 10kg version being the focus of the existing CSI:Cobot case study). The two are combined with an Iconsys modular interface, which provides programmable control over the platform. The system has been CE marked, with the manipulator having 17 adjustable safety functions certified to PLd cat.3. The MiR base complies with EN1525 safety regulations, SICK safety lasers and PLd cat.3.
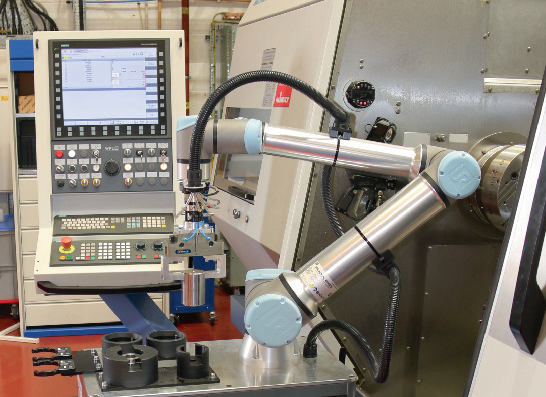
To comply with safety regulations, the iAM-R is currently limited to operation of either the mobile base or collaborative arm at any one time; before moving off the arm and payload are moved into a stowed position within the footprint of the robot. When the arm is operational, the mobile base remains parked. Significant benefit to end users would arise from being able to operate both the arm and mobile base at once, increasing the workspace of the combined robot. This is an open challenge, and a significant increase in complexity beyond that available in current collaborative robot safety controllers. A particular application for this is in opening and tending CNC machines.