CSC413 – Deep Learning and Neural Networks
Led weekly labs, marked assignments, and ran office hours for ~50 students.
Hello! I am a masters student at the University of Toronto advised by Florian Skurti and Tim Barfoot where I have been working on localization using radar for surface vessels. I am broadly interested in computer vision with practical applications to robotics and have in the past worked with cameras, lidar, radar and sonar.
Prior to this I completed my bachelors degree at the University of Illinois at Urbana Champaign (UIUC) in computer engineering, where I worked with Julia Hockenmaier on the Alexa Prize Simbot Challenge. I also worked at Pacific Northwest National Laboratory (PNNL) on detecting fish near turbines using passive sonar and autonomous navigation for a surface vessel.

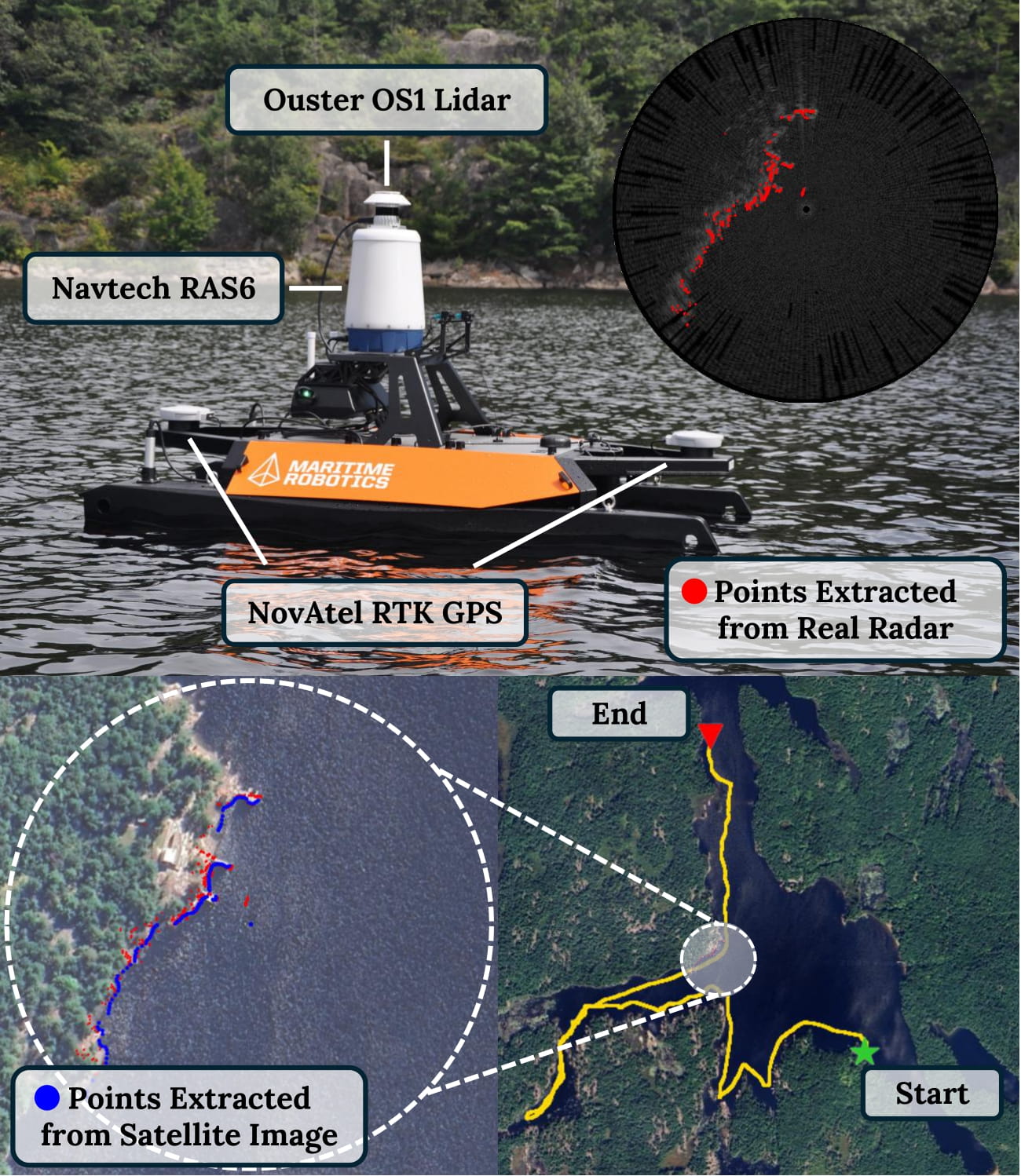
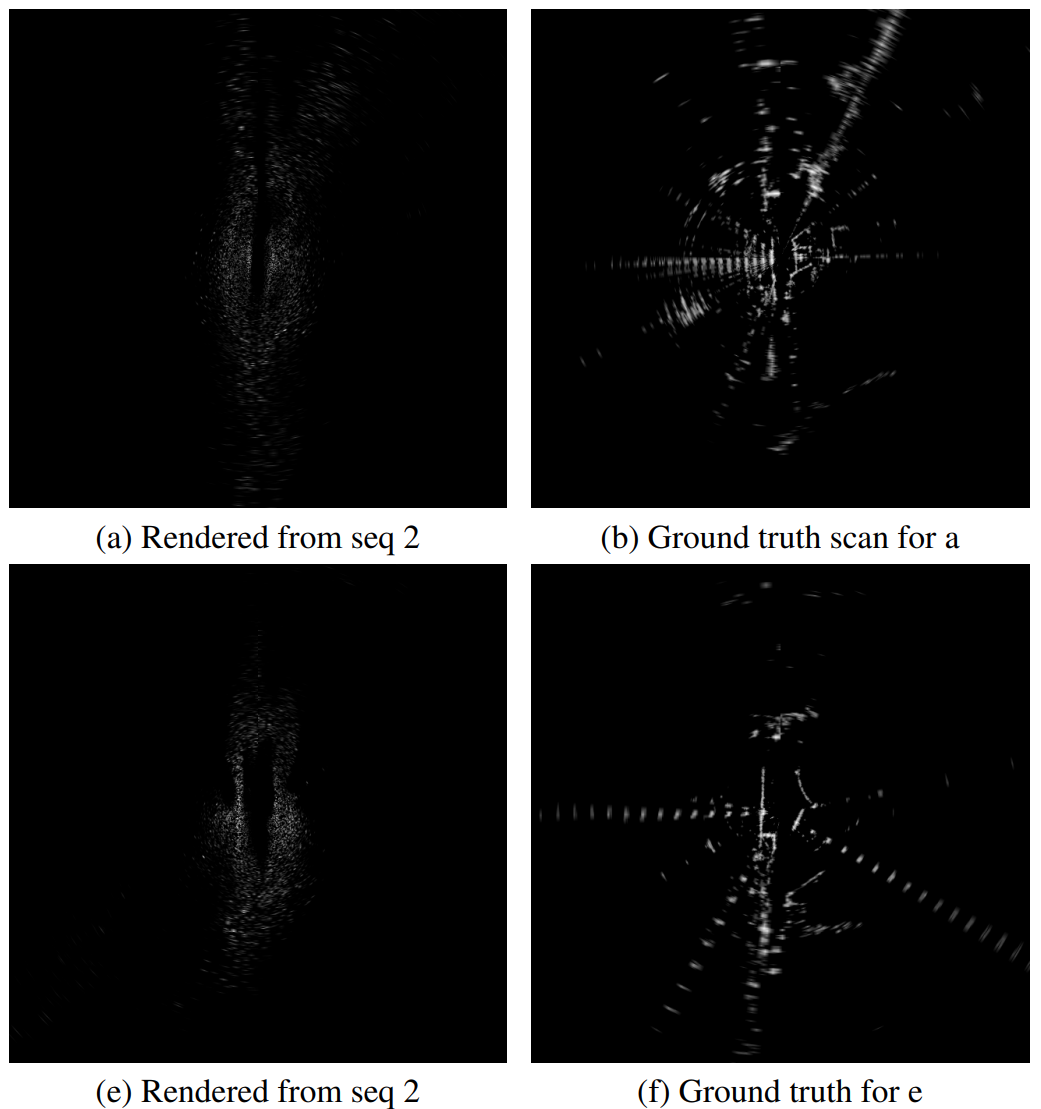
Global localization against RGB satellite images using only mmWave radar on the ground and an initial guess. 50% reduction in error in suburban environments against comparable baselines while maintaining performance in urban environments. First paper to localize against RGB images using mmWave radar in marine environments.
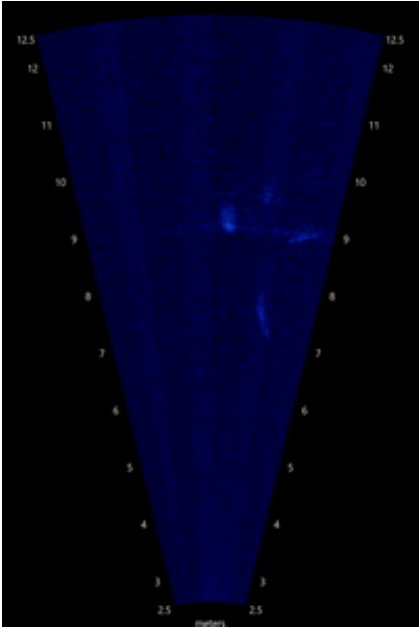
Detecing fish in passive sonar footage pointed at a moving turbine to aid marine biologists in assessing fish interactions near turbines. Used classical methods to reduce video length by 70% while keeping 90% of targets.
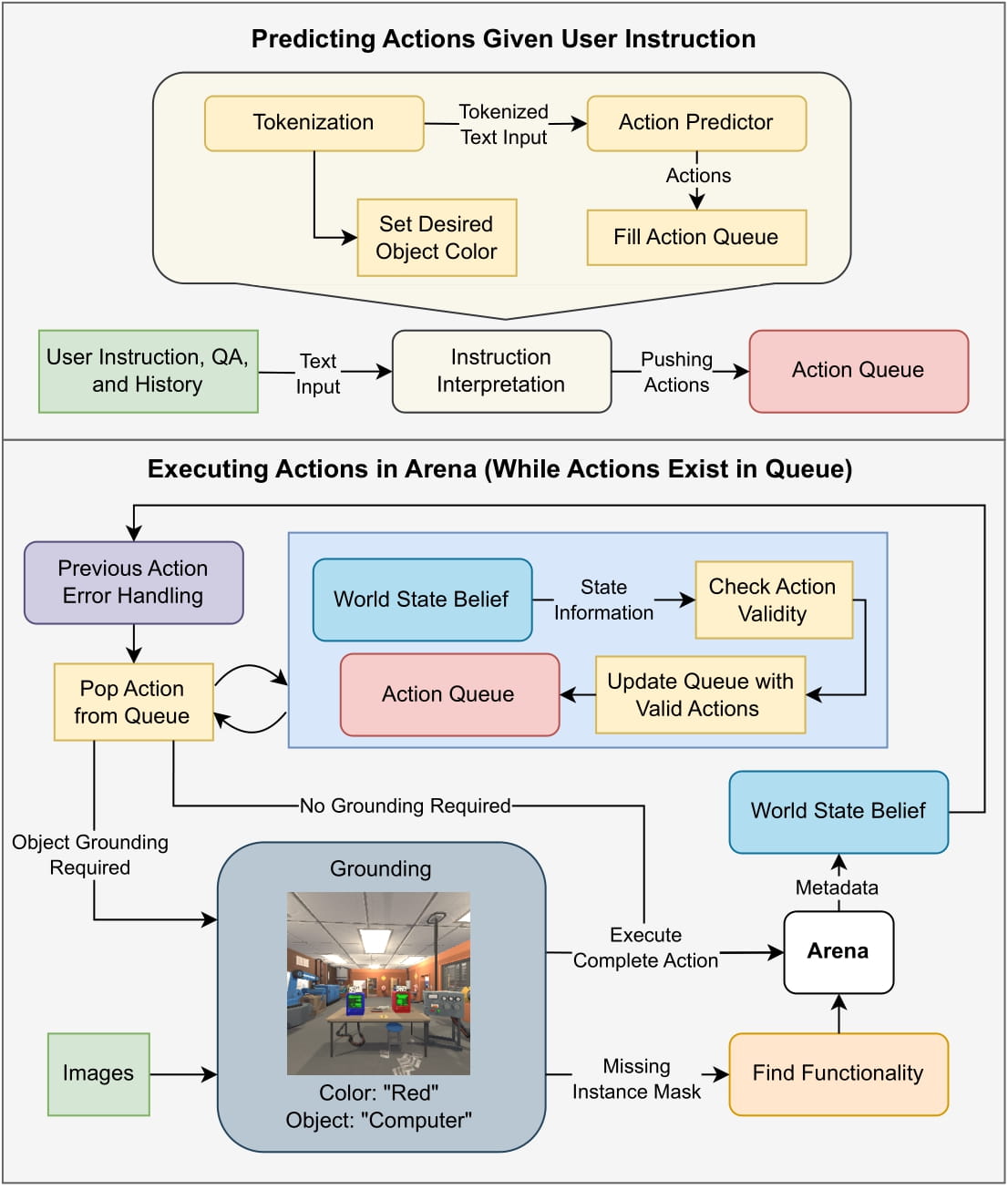
Our bot in the 2023 Alexa Prize Simbot Challenge. Featured a text based seq2seq tranformer, MaskRCNN for object detection and grounding, and a dialog managing state machine within a realtime deployment across all Alexa devices. Competition was scored based on user ratings. Made it to semi-finals stage.


Led weekly labs, marked assignments, and ran office hours for ~50 students.
Hosted office hours, organized exam review sessions, and graded exams for ~150 students.
Hosted office hours, and review sessions for ~150 students.