Abstract
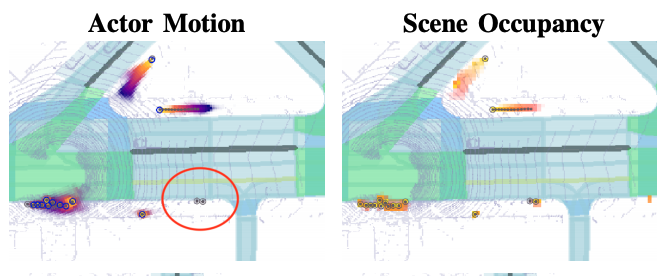
In this paper, we address the important problem in self-driving of forecasting multi-pedestrian motion and their shared scene occupancy map, critical for safe navigation. Our contributions are two-fold. First, we advocate for predicting both the individual motions as well as the scene occupancy map in order to effectively deal with missing detections caused by postprocessing, e.g., confidence thresholding and non-maximum suppression. Second, we propose a Scene-Actor Graph Neural Network (SA-GNN) which preserves the relative spatial information of pedestrians via 2D convolution, and captures the interactions among pedestrians within the same scene, including those that have not been detected, via message passing. On two large-scale real-world datasets, nuScenes and ATG4D, we showcase that our scene-occupancy predictions are more accurate and better calibrated than those from state-of-the-art motion forecasting methods, while also matching their performance in pedestrian motion forecasting metrics.