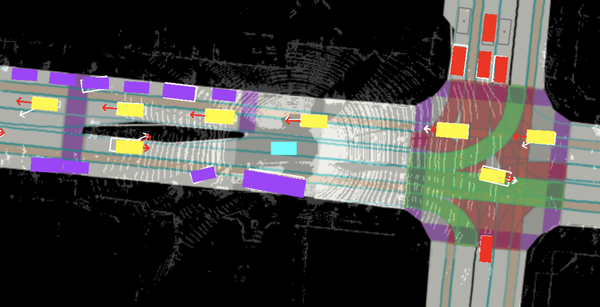
MP3: A Unified Model to Map, Perceive, Predict and Plan
CVPR 2021 (Best Paper Candidate, Oral)
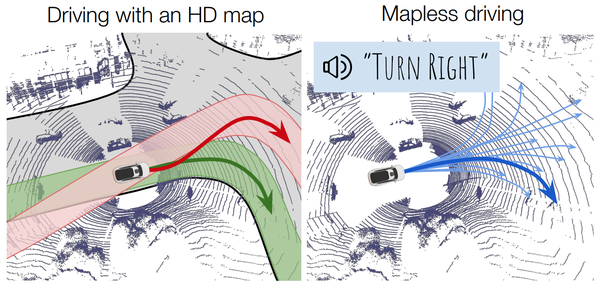
Interpretable end-to-end neural motion planning without high-definition maps
Interpretable end-to-end neural motion planning without high-definition maps
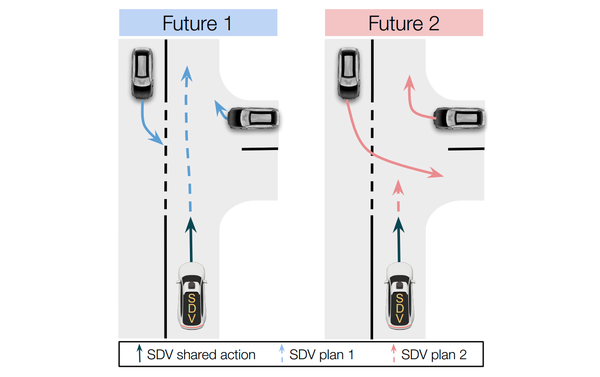
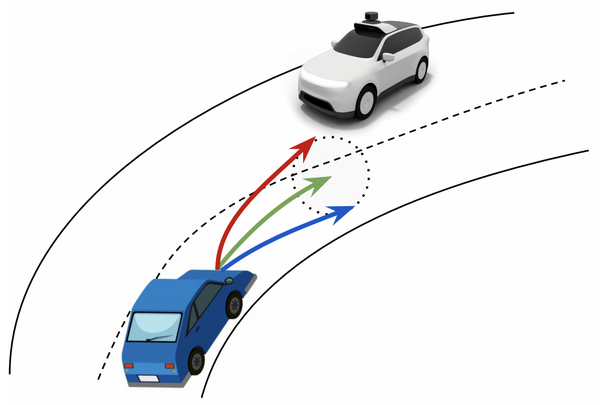
LookOut: Diverse Multi-Future Prediction and Planning for Self-Driving
ICCV 2021 (Oral)
Contingency planning from diverse joint trajectory samples for all actors in the scene
Contingency planning from diverse joint trajectory samples for all actors in the scene
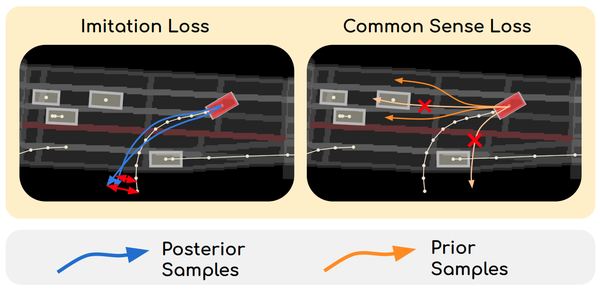
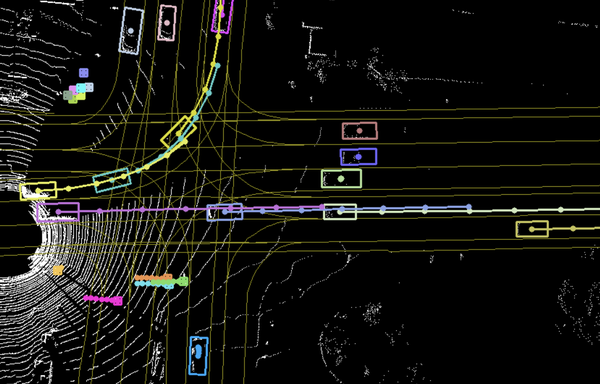
TrafficSim: Learning to Simulate Realistic Multi-Agent Behaviors
CVPR 2021
Realistic long-term vehicle behavior simulation learned from imitation and common sense
Realistic long-term vehicle behavior simulation learned from imitation and common sense
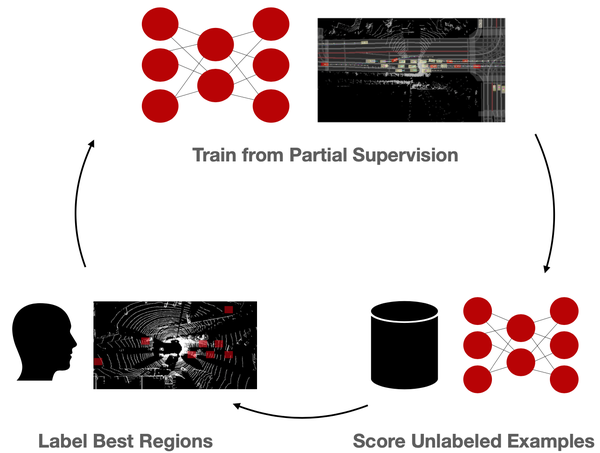
Just Label What You Need: Fine-Grained Active Selection for Perception and Prediction through Partially Labeled Scenes
arXiv preprint 2021
Cost-aware active learning allows for fine-grained selection of examples through partially labeled scenes
Cost-aware active learning allows for fine-grained selection of examples through partially labeled scenes
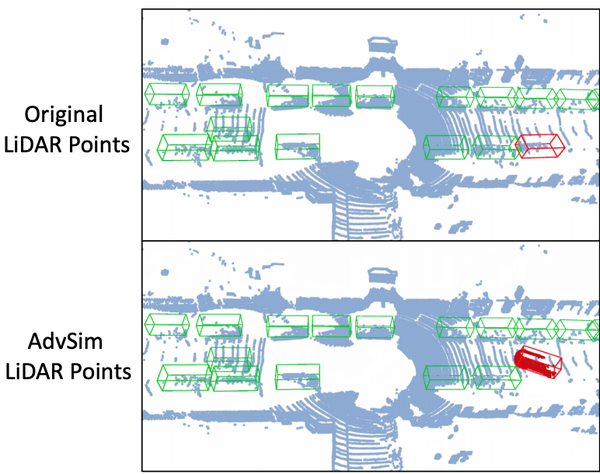
AdvSim: Generating Safety-Critical Scenarios for Self-Driving Vehicles
CVPR 2021
Critical scenario generation by modifying the actors' trajectories in a physically plausible manner and updating the LiDAR sensor data to create realistic observations of the perturbed world
Critical scenario generation by modifying the actors' trajectories in a physically plausible manner and updating the LiDAR sensor data to create realistic observations of the perturbed world
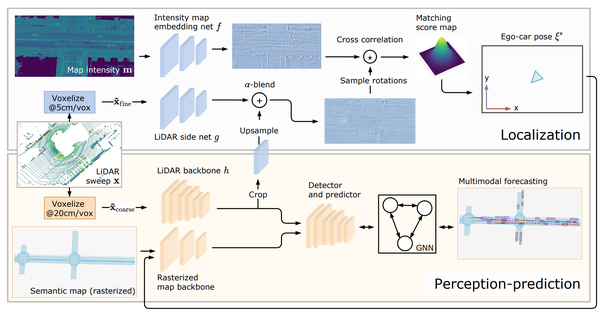
Deep Multi-Task Learning for Joint Localization, Perception, and Prediction
CVPR 2021
Efficient end-to-end joint localization, perception, prediction able to correct localization errors
Efficient end-to-end joint localization, perception, prediction able to correct localization errors
Diverse Complexity Measures for Dataset Curation in Self-driving
IROS 2021
Model-agnostic approach to dataset curation for autonomy tasks
Model-agnostic approach to dataset curation for autonomy tasks
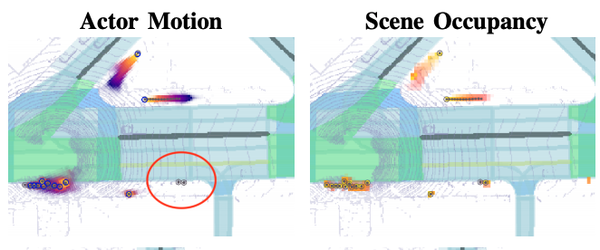
Safety-Oriented Pedestrian Motion and Scene Occupancy Forecasting
IROS 2021
Hybrid instance-based and instance-free approach to pedestrian behavior prediction
Hybrid instance-based and instance-free approach to pedestrian behavior prediction
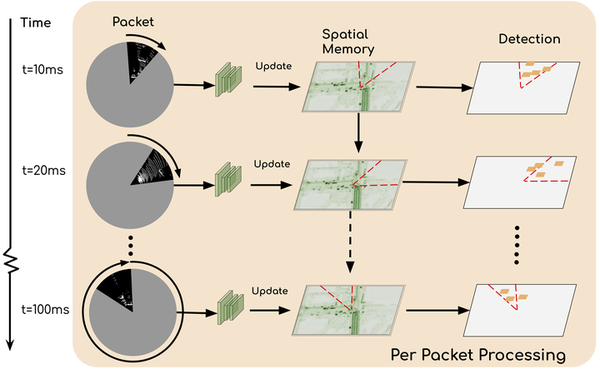
Strobe: Streaming Object Detection from LiDAR Packets
CoRL 2020 (Spotlight)
Existing LiDAR perception systems wait 100ms just to build a sweep. StrObe instead does streaming detection from LiDAR packets and achieve an end-to-end latency of 21ms
Existing LiDAR perception systems wait 100ms just to build a sweep. StrObe instead does streaming detection from LiDAR packets and achieve an end-to-end latency of 21ms
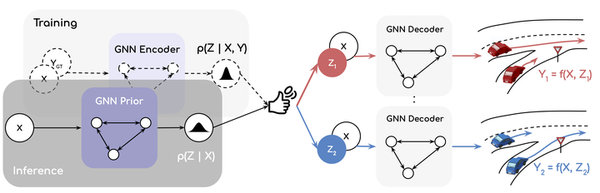
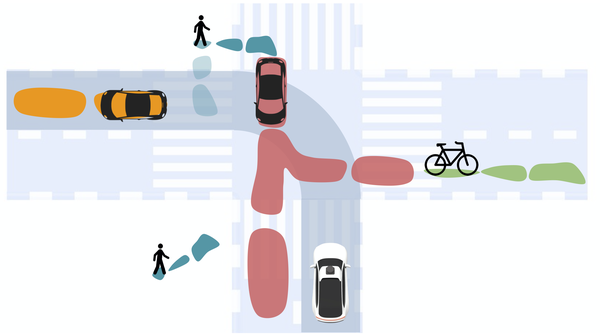
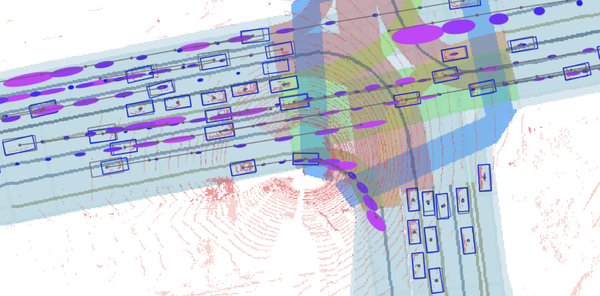
Implicit Latent Variable Model for Scene-Consistent Motion Forecasting
ECCV 2020
ILVM characterizes the joint distribution over multiple actors' future trajectories
ILVM characterizes the joint distribution over multiple actors' future trajectories
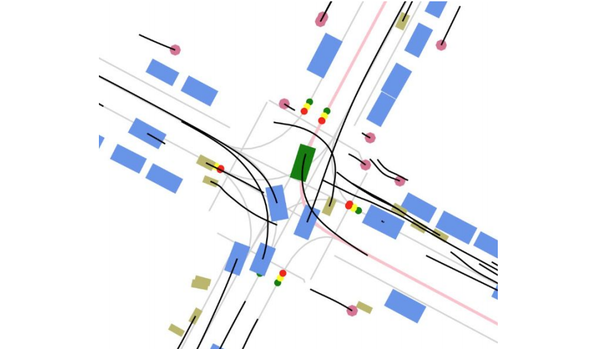
Perceive, Predict, and Plan: Safe Motion Planning Through Interpretable Semantic Representations
ECCV 2020
End-to-end neural motion planner based on interpretable semantic scene occupancies
End-to-end neural motion planner based on interpretable semantic scene occupancies
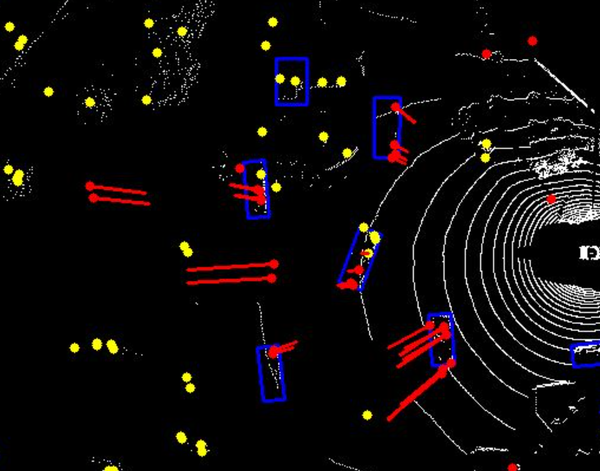
RadarNet: Exploiting Radar for Robust Perception of Dynamic Objects
ECCV 2020
Multi-level fusion of LiDAR & Radar for object detection and velocity estimation
Multi-level fusion of LiDAR & Radar for object detection and velocity estimation
The Importance of Prior Knowledge in Precise Multimodal Prediction
IROS 2020 (Oral)
Incorporate non-differentiable prior knowledge for behavior forecasting
Incorporate non-differentiable prior knowledge for behavior forecasting
PnPNet: End-to-End Perception and Prediction with Tracking in the Loop
CVPR 2020
Tracking in the loop in joint perception and prediction
Tracking in the loop in joint perception and prediction
Spatially-Aware Graph Neural Networks for Relational Behavior Forecasting from Sensor Data
ICRA 2020
Relational reasoning for multi-agent behavior prediction from sensors
Relational reasoning for multi-agent behavior prediction from sensors
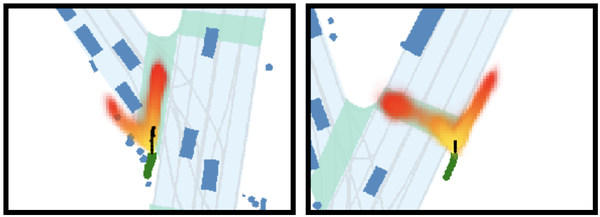
Discrete Residual Flow for Probabilistic Pedestrian Behavior Prediction
CoRL 2019 (Spotlight)
Long-term pedestrian forecasting with occupancy grid maps
Long-term pedestrian forecasting with occupancy grid maps
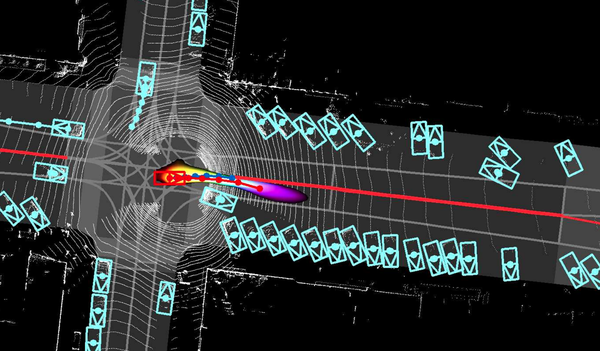
End-to-end Interpretable Neural Motion Planner
CVPR 2019 (Oral)
Neural motion planner from LiDAR and HD maps
Neural motion planner from LiDAR and HD maps
Intentnet: Learning to Predict Intention from Raw Sensor Data
CoRL 2018 (Spotlight)
Joint perception and prediction from LiDAR point clouds and HD maps
Joint perception and prediction from LiDAR point clouds and HD maps