|
James Tu
I am a MSc student under the supervision of professor Raquel Urtasun at the University of Toronto. I also received my bachelors in Engineering Science at the University of Toronto, majoring in eletrical and computer engineering and with a minor in robotics. Previously, I worked as a research scientist on self-driving at Uber ATG and on protein folding at ProteinQure. In my spare time I like to go rock climbing, listen to music, and play guitar.
Email /
CV /
Google Scholar
|

|
|
Research
I'm interested in computer vision, machine learning, self-driving, and reinforcement learning. My research so far has focused on self-driving, particularly regarding adversarial robustness, perception, and vehicle-to-vehicle communication.
|
|
Exploring Adversarial Robustness of Multi-Sensor Perception Systems in Self Driving
James Tu,
Huichen Li,
Xinchen Yan,
Mengye Ren,
Yun Chen,
Ming Liang,
Eilyan Bitar,
Ersin Yumer,
Raquel Urtasun
Arxiv, 2021
abstract |
arXiv
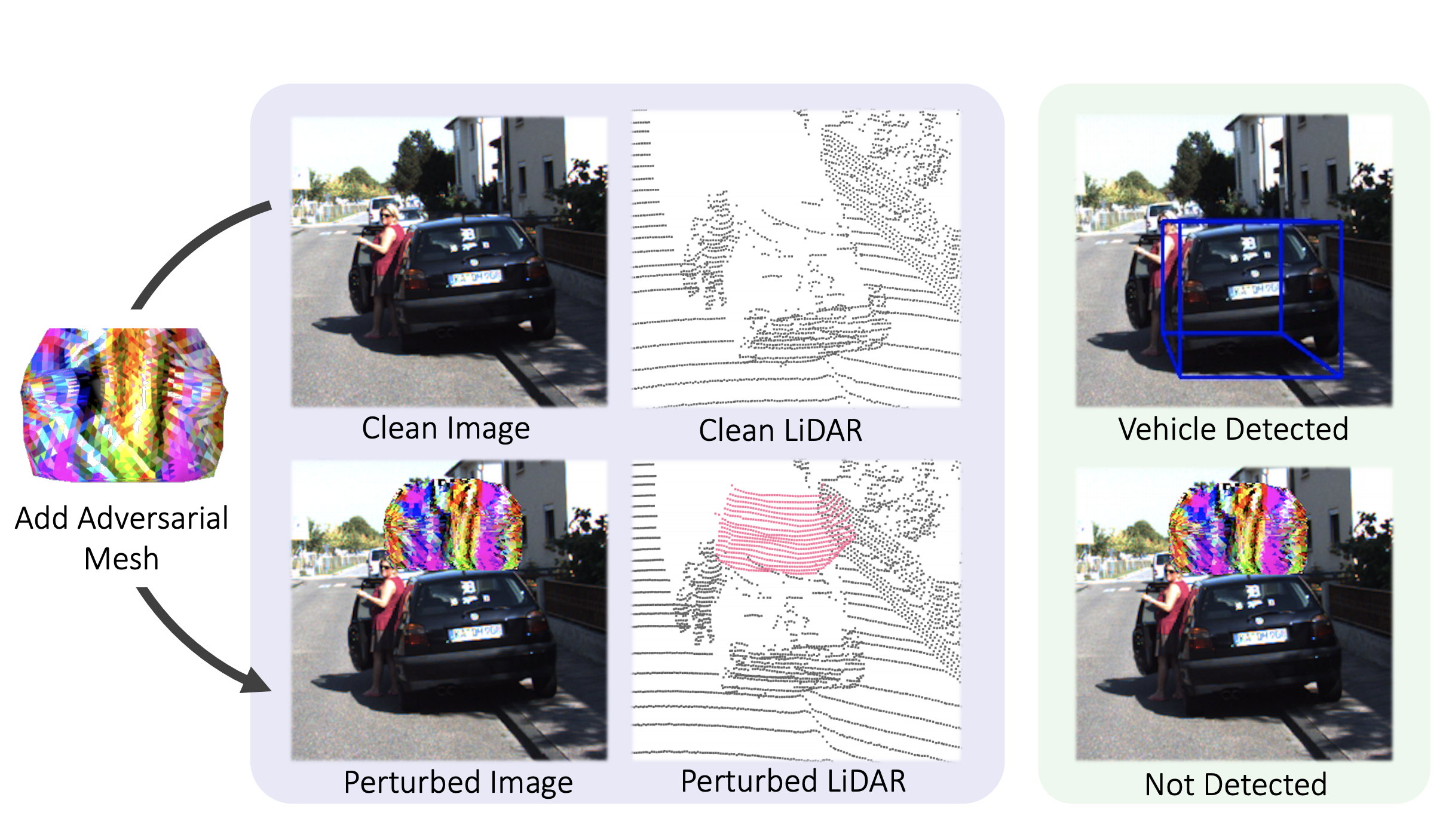
Modern self-driving perception systems have been shown to improve upon processing complementary inputs such as LiDAR with images. In isolation, 2D images have been found to be extremely vulnerable to adversarial attacks. Yet, there have been limited studies on the adversarial robustness of multi-modal models that fuse LiDAR features with image features. Furthermore, existing works do not consider physically realizable perturbations that are consistent across the input modalities. In this paper, we showcase practical susceptibilities of multi-sensor detection by placing an adversarial object on top of a host vehicle. We focus on physically realizable and input-agnostic attacks as they are feasible to execute in practice, and show that a single universal adversary can hide different host vehicles from state-of-the-art multi-modal detectors. Our experiments demonstrate that successful attacks are primarily caused by easily corrupted image features. Furthermore, we find that in modern sensor fusion methods which project image features into 3D, adversarial attacks can exploit the projection process to generate false positives across distant regions in 3D. Towards more robust multi-modal perception systems, we show that adversarial training with feature denoising can boost robustness to such attacks significantly. However, we find that standard adversarial defenses still struggle to prevent false positives which are also caused by inaccurate associations between 3D LiDAR points and 2D pixels.
|
|
Adversarial Attacks Against Multi-Agent Communication
James Tu*,
Tsunhsuan Wang*,
Jingkang Wang,
Siva Manivasagam,
Mengye Ren,
Raquel Urtasun
ICCV, 2021
abstract |
arXiv
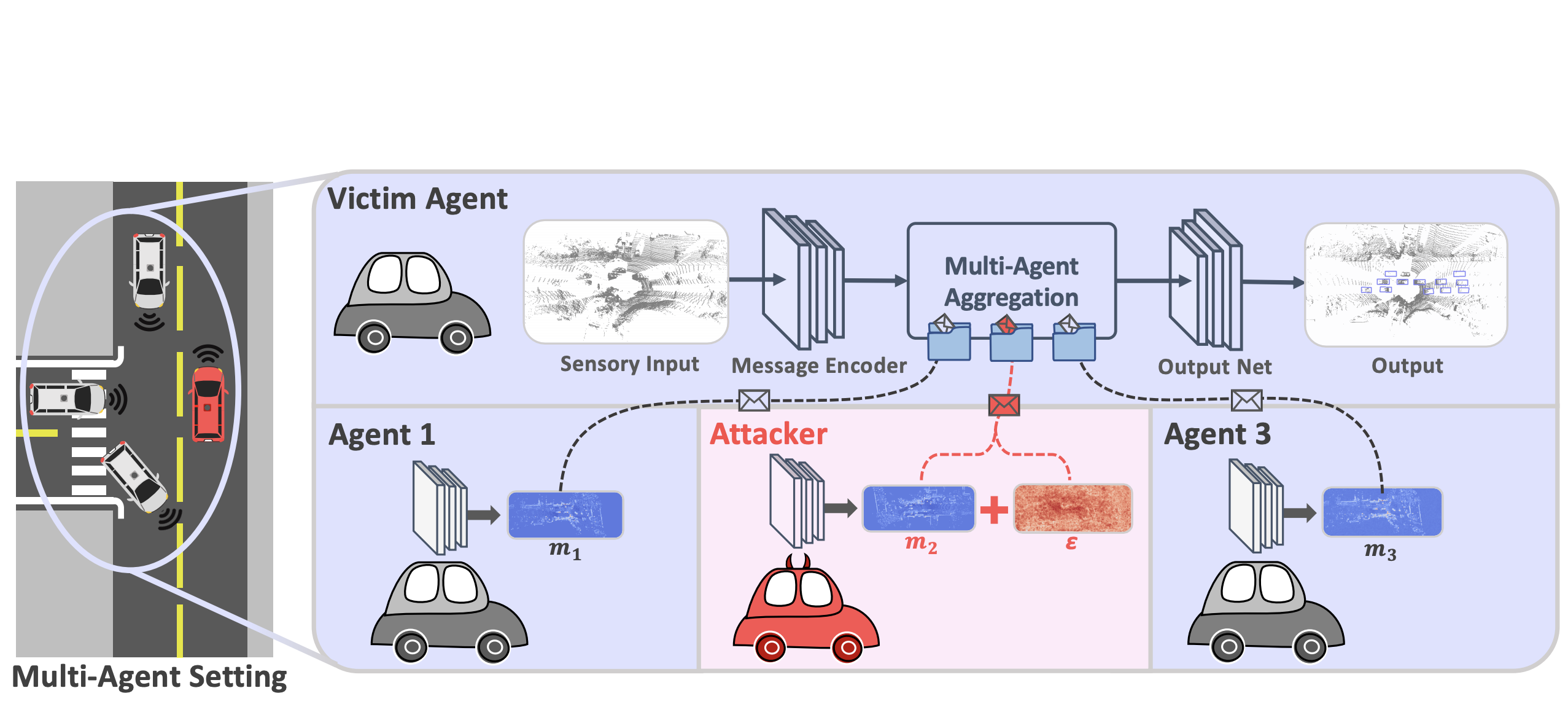
Growing at a very fast pace, modern autonomous systems will soon be deployed at scale, opening up the possibility for cooperative multi-agent systems. By sharing information and distributing workloads, autonomous agents can better perform their tasks and enjoy improved computation efficiency. However, such advantages rely heavily on communication channels which have been shown to be vulnerable to security breaches. Thus, communication can be compromised to execute adversarial attacks on deep learning models which are widely employed in modern systems. In this paper, we explore such adversarial attacks in a novel multi-agent setting where agents communicate by sharing learned intermediate representations. We observe that an indistinguishable adversarial message can severely degrade performance, but becomes weaker as the number of benign agents increase. Furthermore, we show that transfer attacks are more difficult in this setting when compared to directly perturbing the inputs, as it is necessary to align the distribution of communication messages with domain adaptation. Finally, we show that low-budget online attacks can be achieved by exploiting the temporal consistency of streaming sensory inputs.
|
|
AdvSim: Generating Safety-Critical Scenarios for Self-Driving Vehicles
Jingkang Wang,
Ava Pun,
James Tu,
Siva Manivasagam,
Abbas Sadat,
Sergio Casas,
Mengye Ren,
Raquel Urtasun
CVPR, 2021
abstract |
arXiv
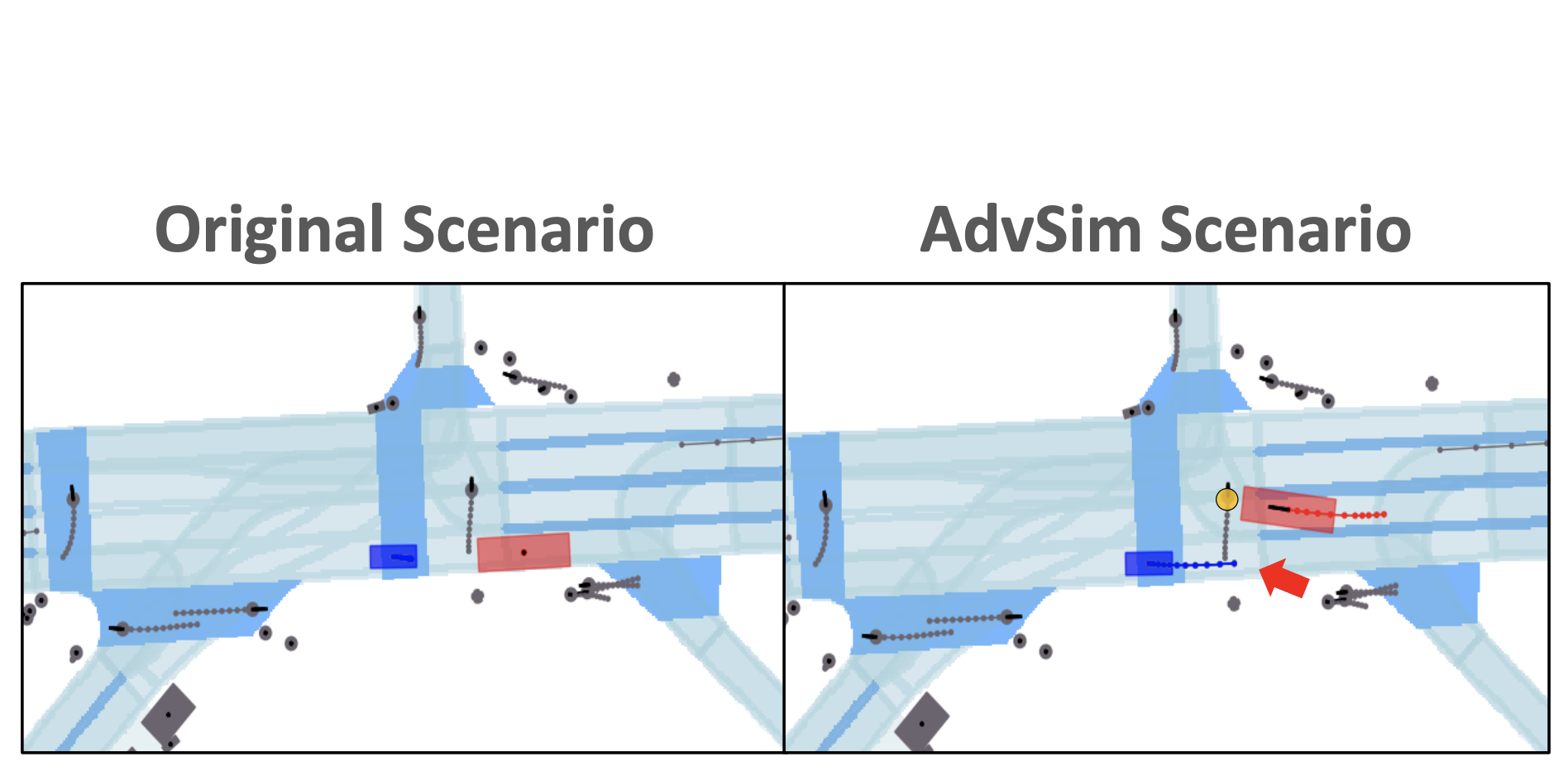
As self-driving systems become better, simulating scenarios where the autonomy stack is likely to fail becomes of key importance. Traditionally, those scenarios are generated for a few scenes with respect to the planning module that takes ground-truth actor states as input. This does not scale and cannot identify all possible autonomy failures, such as perception failures due to occlusion. In this paper, we propose AdvSim, an adversarial framework to generate safety-critical scenarios for any LiDAR-based autonomy system. Given an initial traffic scenario, AdvSim modifies the actors' trajectories in a physically plausible manner and updates the LiDAR sensor data to create realistic observations of the perturbed world. Importantly, by simulating directly from sensor data, we obtain adversarial scenarios that are safety-critical for the full autonomy stack. Our experiments show that our approach is general and can identify thousands of semantically meaningful safety-critical scenarios for a wide range of modern self-driving systems. Furthermore, we show that the robustness and safety of these autonomy systems can be further improved by training them with scenarios generated by AdvSim.
|
|
Diverse Complexity Measuresfor Dataset Curation in Self-driving
Abbas Sadat,
Sean Segal,
Sergio Casas,
James Tu,
Bin Yang,
Raquel Urtasun,
Ersin Yumer
IROS, 2021
abstract |
arXiv
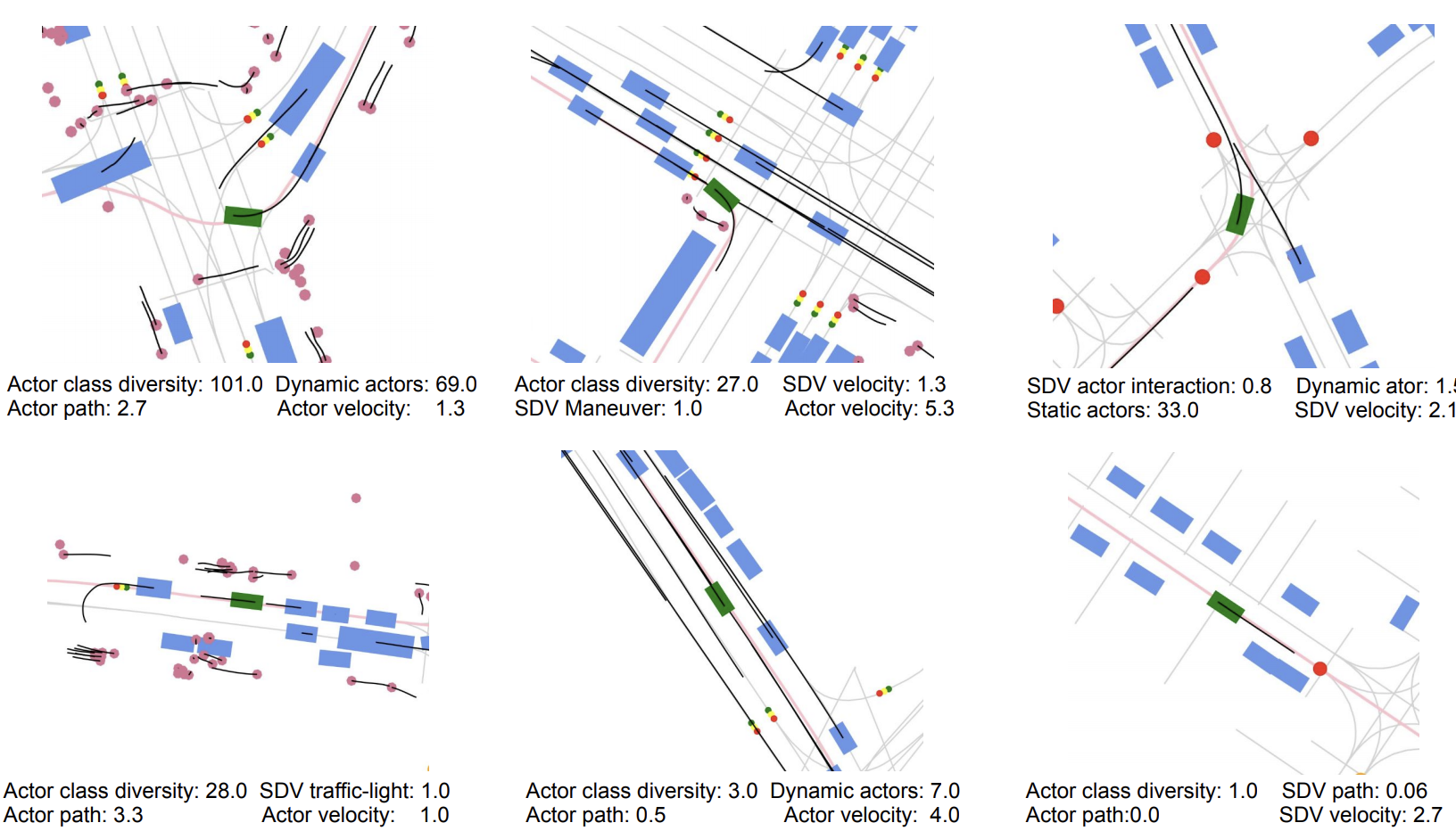
Modern self-driving autonomy systems heavily rely on deep learning. As a consequence, their performance is influenced significantly by the quality and richness of the training data. Data collecting platforms can generate many hours of raw data in a daily basis, however, it is not feasible to label everything. It is thus of key importance to have a mechanism to identify" what to label". Active learning approaches identify examples to label, but their interestingness is tied to a fixed model performing a particular task. These assumptions are not valid in self-driving, where we have to solve a diverse set of tasks (ie, perception, and motion forecasting) and our models evolve over time frequently. In this paper we introduce a novel approach and propose a new data selection method that exploits a diverse set of criteria that quantize interestingness of traffic scenes. Our experiments on a wide range of tasks and models show that the proposed curation pipeline is able to select datasets that lead to better generalization and higher performance.
|
|
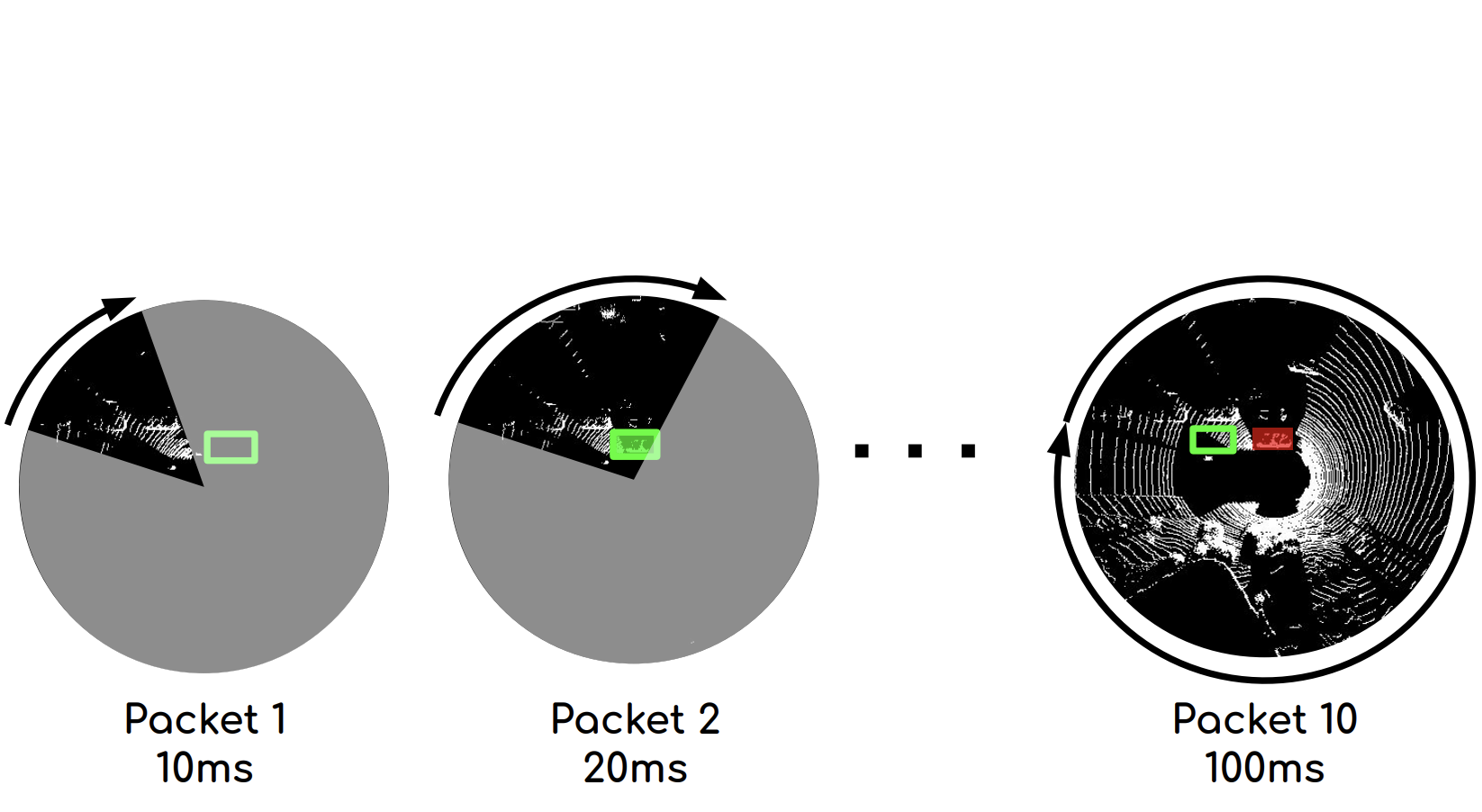
StrObe: Streaming Object Detection fromLiDAR Packets
Davi Frossard,
Simon Suo,
Sergio Casas,
James Tu,
Rui Hu,
Raquel Urtasun
CoRL, 2020
abstract |
arXiv
Many modern robotics systems employ LiDAR as their main sensing modality due to its geometrical richness. Rolling shutter LiDARs are particularly common, in which an array of lasers scans the scene from a rotating base. Points are emitted as a stream of packets, each covering a sector of the 360 coverage. Modern perception algorithms wait for the full sweep to be built before processing the data, which introduces an additional latency. For typical 10Hz LiDARs this will be 100ms. As a consequence, by the time an output is produced, it no longer accurately reflects the state of the world. This poses a challenge, as robotics applications require minimal reaction times, such that maneuvers can be quickly planned in the event of a safety-critical situation. In this paper we propose StrObe, a novel approach that minimizes latency by ingesting LiDAR packets and emitting a stream of detections without waiting for the full sweep to be built. StrObe reuses computations from previous packets and iteratively updates a latent spatial representation of the scene, which acts as a memory, as new evidence comes in, resulting in accurate low-latency perception. We demonstrate the effectiveness of our approach on a large scale real-world dataset, showing that StrObe far outperforms the state-of-the-art when latency is taken into account, and matches the performance in the traditional setting.
|
|
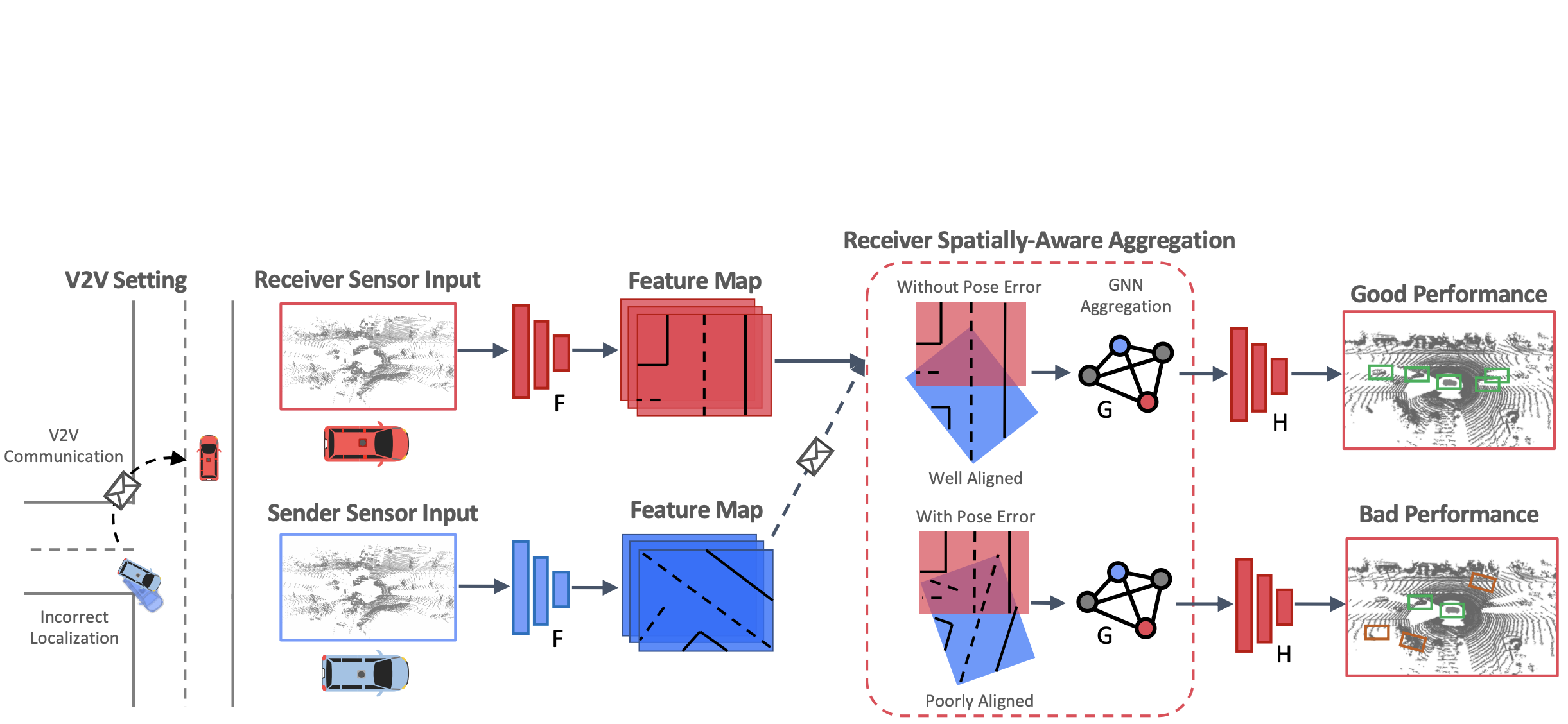
Learning to Communicate and Correct Pose Errors
Nicholas Vadivelu,
Mengye Ren,
James Tu,
Jingkang Wang,
Raquel Urtasun
CoRL, 2020
abstract |
arXiv
Learned communication makes multi-agent systems more effective by aggregating distributed information. However, it also exposes individual agents to the threat of erroneous messages they might receive. In this paper, we study the setting proposed in V2VNet, where nearby self-driving vehicles jointly perform object detection and motion forecasting in a cooperative manner. Despite a huge performance boost when the agents solve the task together, the gain is quickly diminished in the presence of pose noise since the communication relies on spatial transformations. Hence, we propose a novel neural reasoning framework that learns to communicate, to estimate potential errors, and finally, to reach a consensus about those errors. Experiments confirm that our proposed framework significantly improves the robustness of multi-agent self-driving perception and motion forecasting systems under realistic and severe localization noise.
|
|
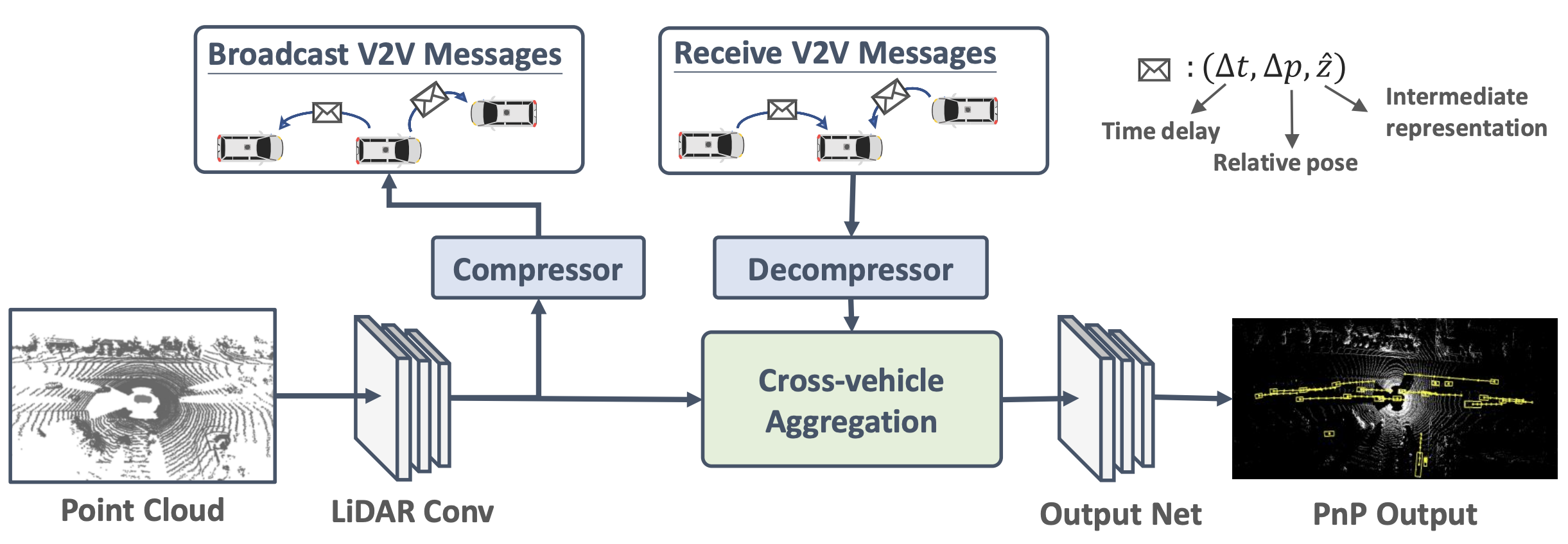
V2vnet: Vehicle-to-vehicle communication for joint perception and prediction
Tsun-Hsuan Wang,
Sivabalan Manivasagam,
Ming Liang,
Bin Yang,
Wenyuan Zeng,
James Tu,
Raquel Urtasun
ECCV, 2020
abstract |
arXiv
In this paper, we explore the use of vehicle-to-vehicle (V2V) communication to improve the perception and motion forecasting performance of self-driving vehicles. By intelligently aggregating the information received from multiple nearby vehicles, we can observe the same scene from different viewpoints. This allows us to see through occlusions and detect actors at long range, where the observations are very sparse or non-existent. We also show that our approach of sending compressed deep feature map activations achieves high accuracy while satisfying communication bandwidth requirements.
|
|
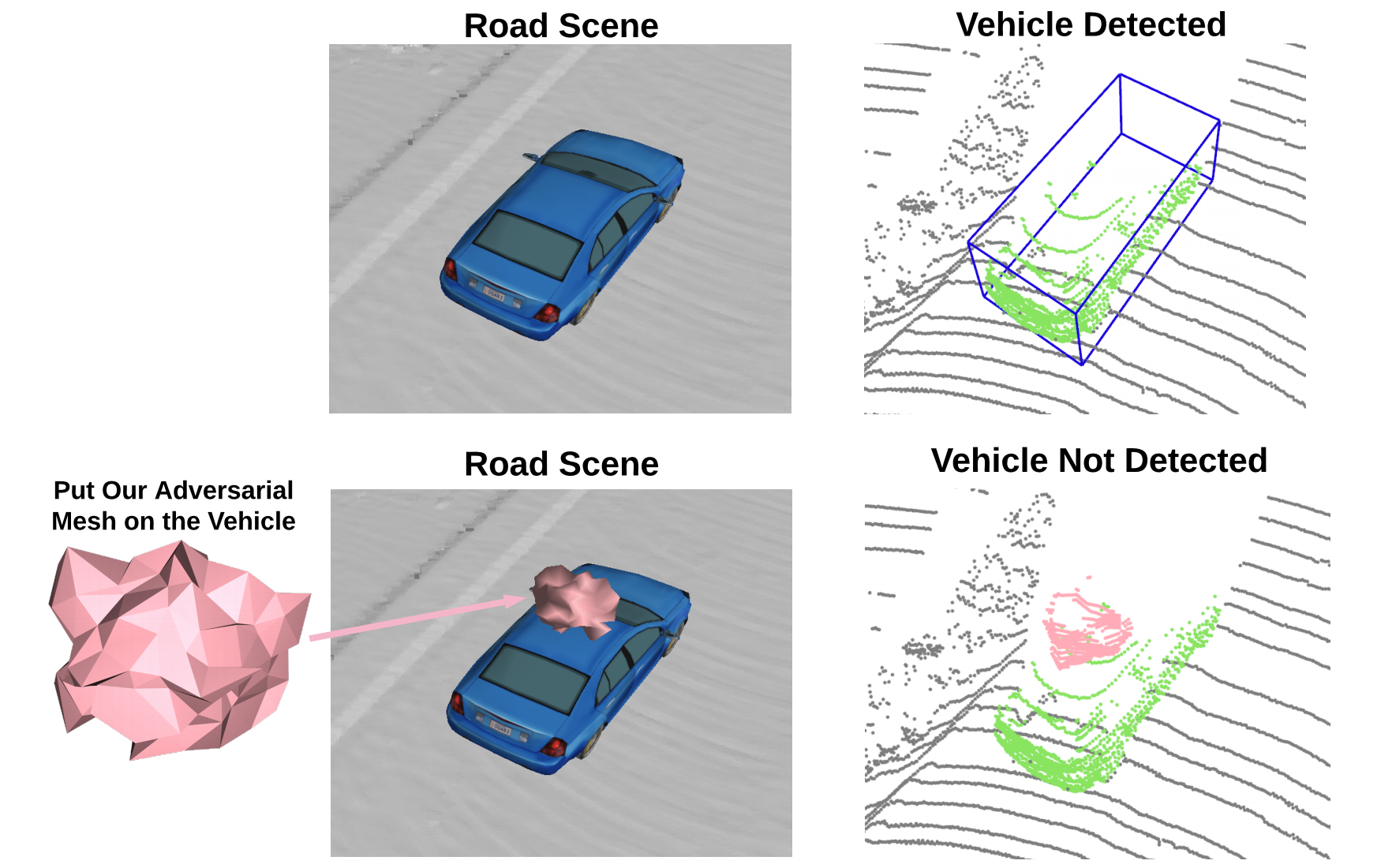
Physcally Realizable Adversarial Examples For LiDAR Object Detection
James Tu,
Mengye Ren,
Siva Manivasagam,
Ming Liang,
Bin Yang,
Richard Du,
Frank Cheng,
Raquel Urtasun
CVPR, 2020
abstract |
arXiv
Modern autonomous driving systems rely heavily on deep learning models to process point cloud sensory data; meanwhile, deep models have been shown to be susceptible to adversarial attacks with visually imperceptible perturbations. Despite the fact that this poses a security concern for the self-driving industry, there has been very little exploration in terms of 3D perception, as most adversarial attacks have only been applied to 2D flat images. In this paper, we address this issue and present a method to generate universal 3D adversarial objects to fool LiDAR detectors. In particular, we demonstrate that placing an adversarial object on the rooftop of any target vehicle to hide the vehicle entirely from LiDAR detectors with a success rate of 80%. We report attack results on a suite of detectors using various input representation of point clouds. We also conduct a pilot study on adversarial defense using data augmentation. This is one step closer towards safer self-driving under unseen conditions from limited training data.
|
|
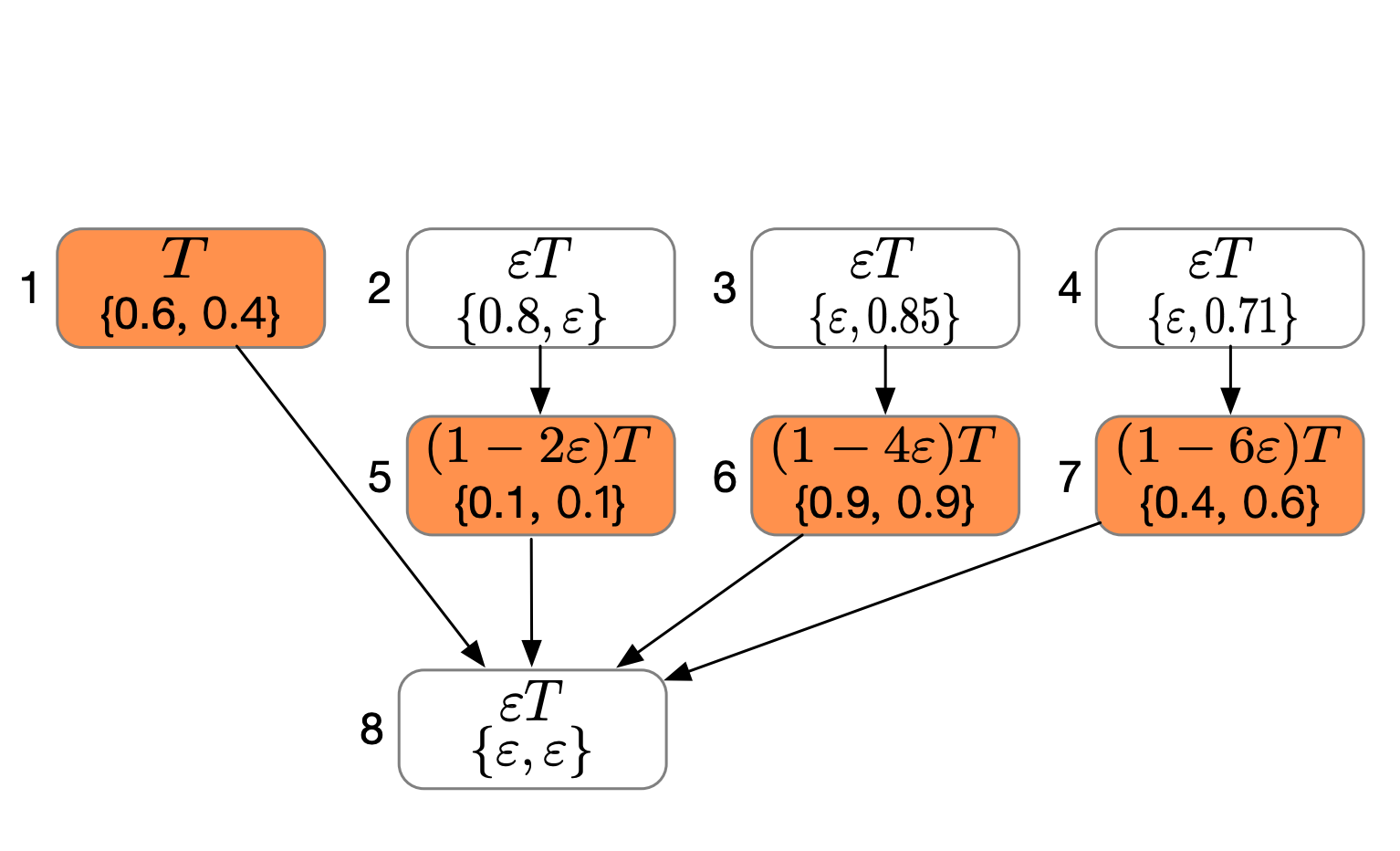
Spear: Optimized dependency-aware task scheduling with deep reinforcement learning
Zhiming Hu,
James Tu,
Baochun Li
ICDCS, 2019
abstract |
Paper
Modern data parallel frameworks, such as Apache Spark, are designed to execute complex data processing jobs that contain a large number of tasks, with dependencies between these tasks represented by a directed acyclic graph (DAG). When scheduling these tasks, the ultimate objective is to minimize the makespan of the schedule, which is equivalent to minimizing the job completion time. With task dependencies, however, minimizing the makespan of the schedule is nontrivial, especially when tasks in the DAG have different resource demands with respect to multiple resource types.
In this paper, we present Spear, a new scheduling framework designed to minimize the makespan of complex jobs, while considering both task dependencies and heterogeneous resource demands at the same time. Inspired by recent advances in artificial intelligence, Spear applies Monte Carlo Tree Search (MCTS) in the specific context of task scheduling, and trains a deep reinforcement learning model to guide the expansion and rollout steps in MCTS. With deep reinforcement learning, search efficiency can be significantly improved by focusing on more promising branches. With both simulations and experiments using traces from production workloads, we compare the scheduling performance of Spear with state-of-the-art job schedulers in the literature, and Spear can outperform those approaches by up to 20%. Our results have validated our claims that MCTS and deep reinforcement learning can readily be applied to optimize the scheduling of complex jobs with task dependencies.
|
|