
Jonah Philion
I'm a PhD student at University of Toronto working on machine learning and computer vision, primarily with applications to self-driving. I'm advised by Sanja Fidler. I'm also a part-time research scientist at NVIDIA.
Before coming to University of Toronto, I worked for a year on the perception team at ISEE. I did my undergrad at Harvard University where I studied Physics and Math and minored in computer science. During college, I was also part of the Harvard/NEC program for jazz performance (alto saxophone).
Twitter / Google Scholar / Github / CV
Research
M2BEV: Multi-Camera Joint 3D Detection and Segmentation with Unified Birds-Eye View Representation
Enze Xie, Zhiding Yu, Daquan Zhou, Jonah Philion, Anima Anandkumar, Sanja Fidler, Ping Luo, Jose M. Alvarez
In submission
project page / arXiv / bibtex
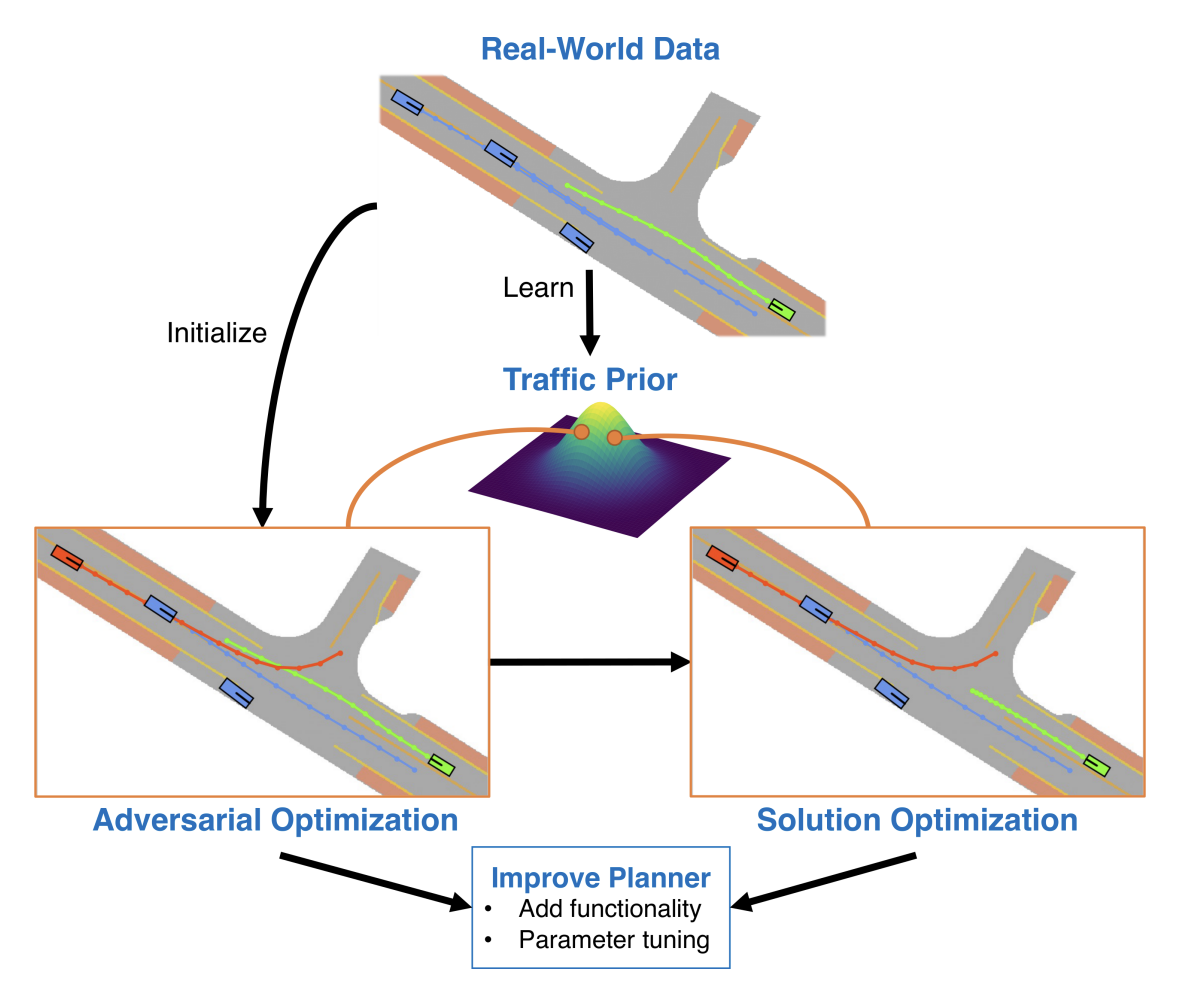
Generating Useful Accident-Prone Driving Scenarios via a Learned Traffic Prior
Davis Rempe, Jonah Philion, Leonidas J. Guibas, Sanja Fidler, Or Litany
CVPR 2022
project page / arXiv / bibtex
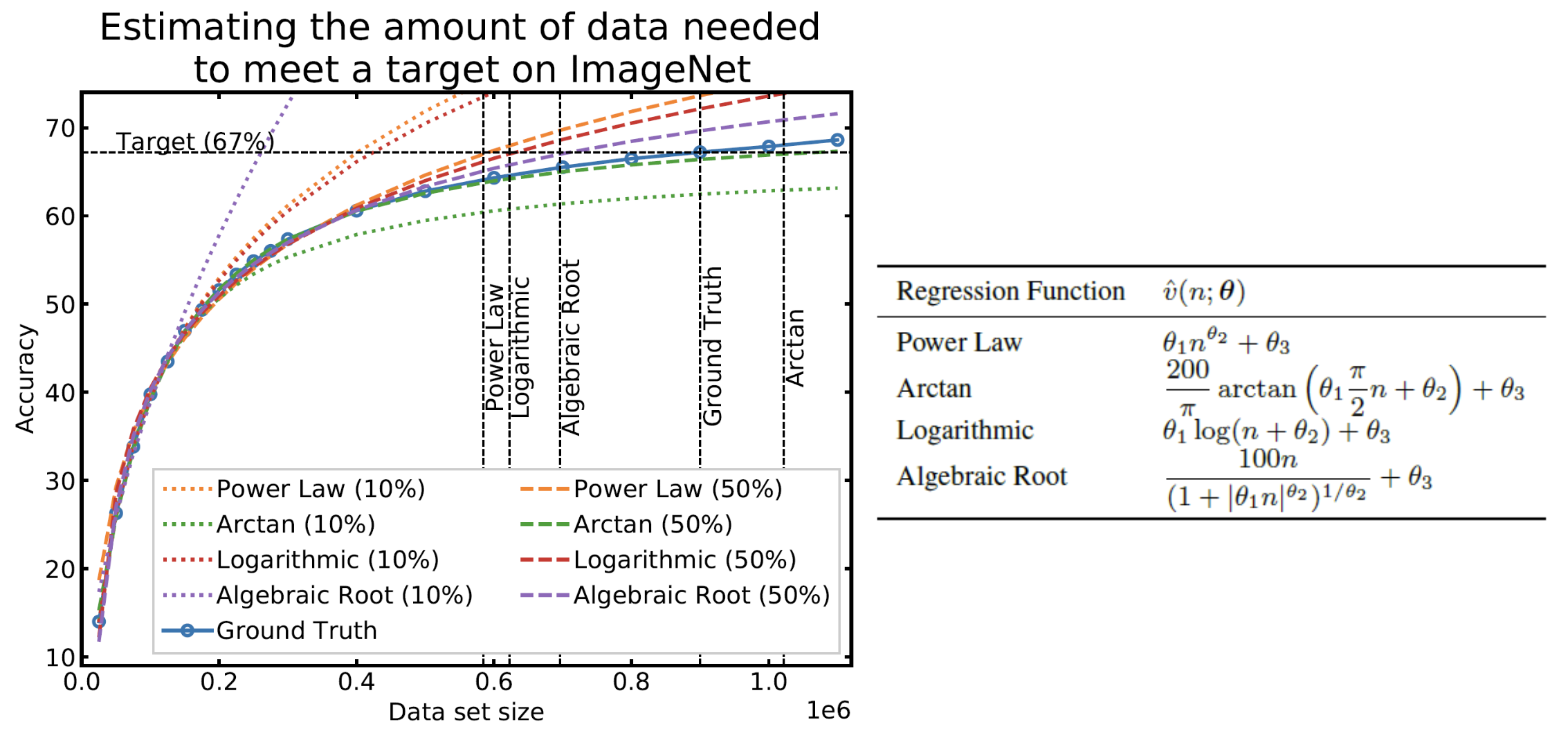
How Much More Data Do I Need? Estimating Requirements for Downstream Tasks
Rafid Mahmood, James Lucas, David Acuna, Daiqing Li, Jonah Philion, Jose M Alvarez, Zhiding Yu, Sanja Fidler, Marc T. Law
CVPR 2022
project page / arXiv / bibtex
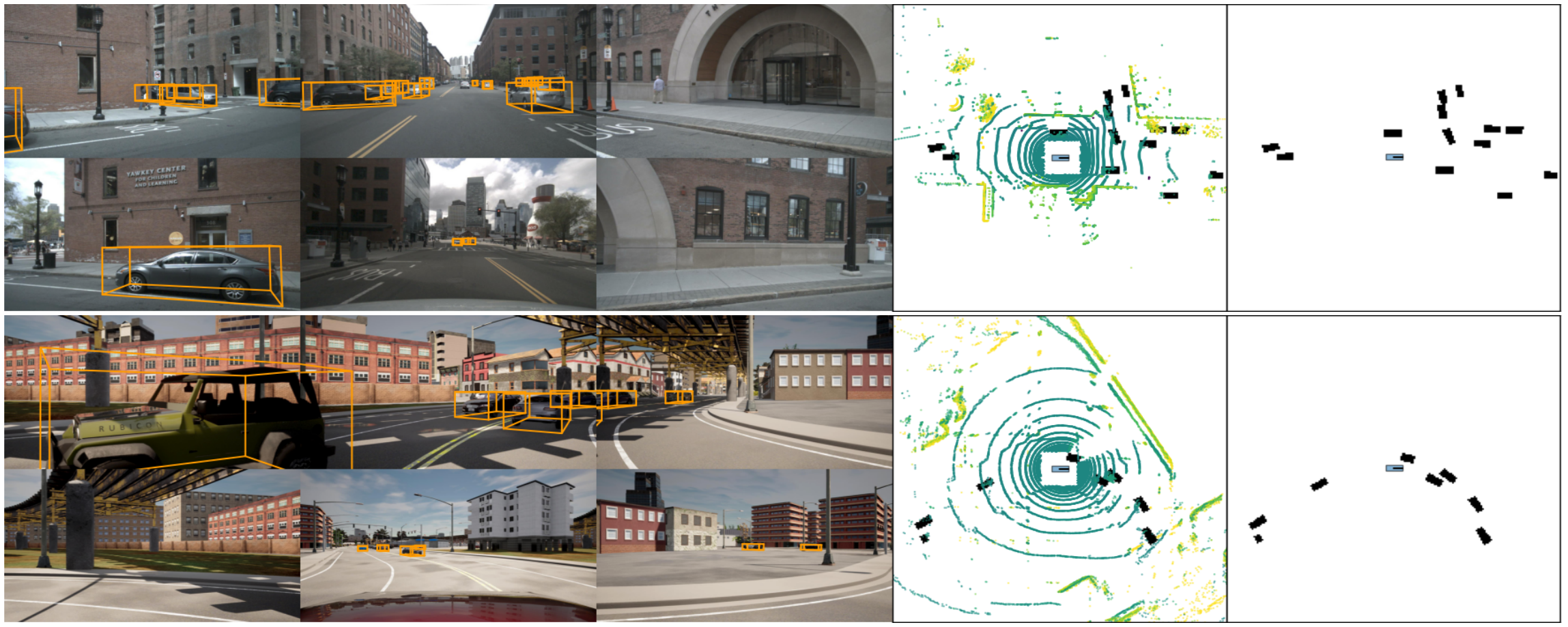
Towards Optimal Strategies for Training Self-Driving Perception Models in Simulation
David Acuna*, Jonah Philion*, Sanja Fidler
NeurIPS 2021
project page / arXiv / bibtex

Learning Indoor Inverse Rendering with 3D Spatially-Varying Lighting
Zian Wang, Jonah Philion, Sanja Fidler, Jan Kautz
ICCV 2021 (oral)
project page / arXiv / bibtex

DriveGAN: Towards a Controllable High-Quality Neural Simulation
Seung Wook Kim, Jonah Philion, Antonio Torralba, Sanja Fidler
CVPR 2021 (oral)
project page / arXiv / bibtex
Emergent Road Rules In Multi-Agent Driving Environments
Avik Pal, Jonah Philion, Yuan-Hong Liao, Sanja Fidler
ICLR 2020
project page / arXiv / code / bibtex
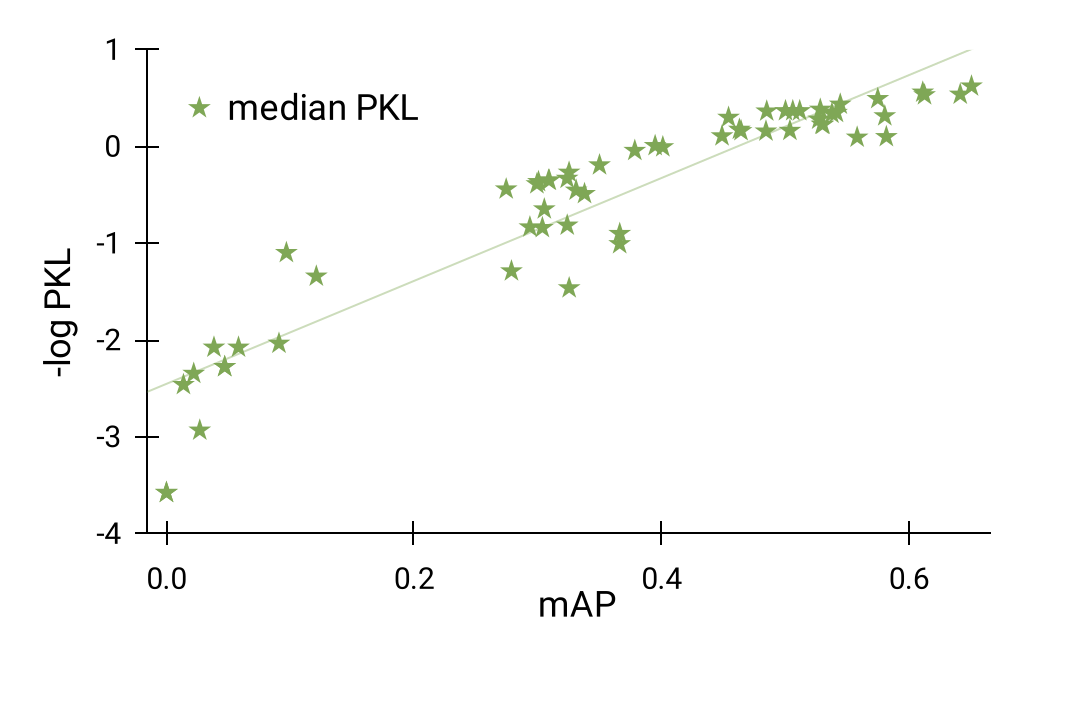
The Efficacy of Neural Planning Metrics: A Meta-Analysis of PKL on nuScenes
Yiluan Guo, Holger Caesar, Oscar Beijbom, Jonah Philion, Sanja Fidler
IROS 2020 Workshop on Benchmarking Progress in Autonomous Driving
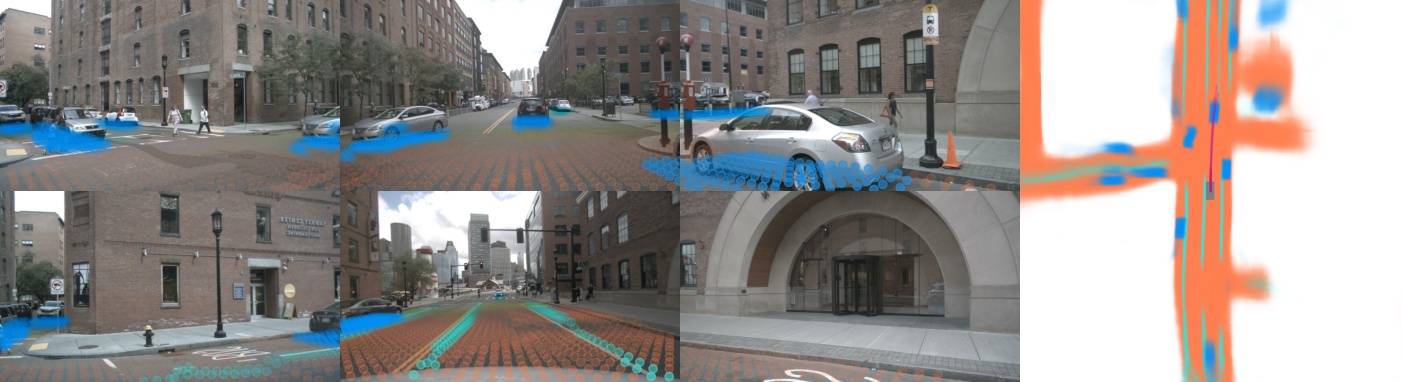
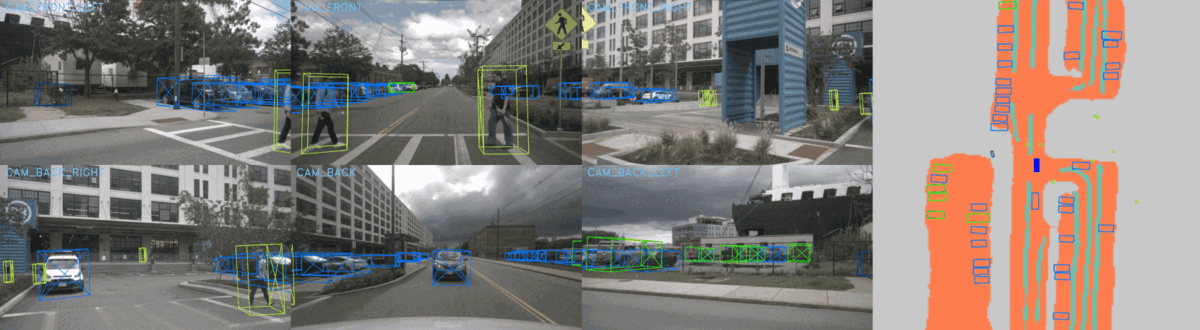
Lift, Splat, Shoot: Encoding Images From Arbitrary Camera Rigs by Implicitly Unprojecting to 3D
Jonah Philion, Sanja Fidler
ECCV 2020
project page / arXiv / code / video / bibtex
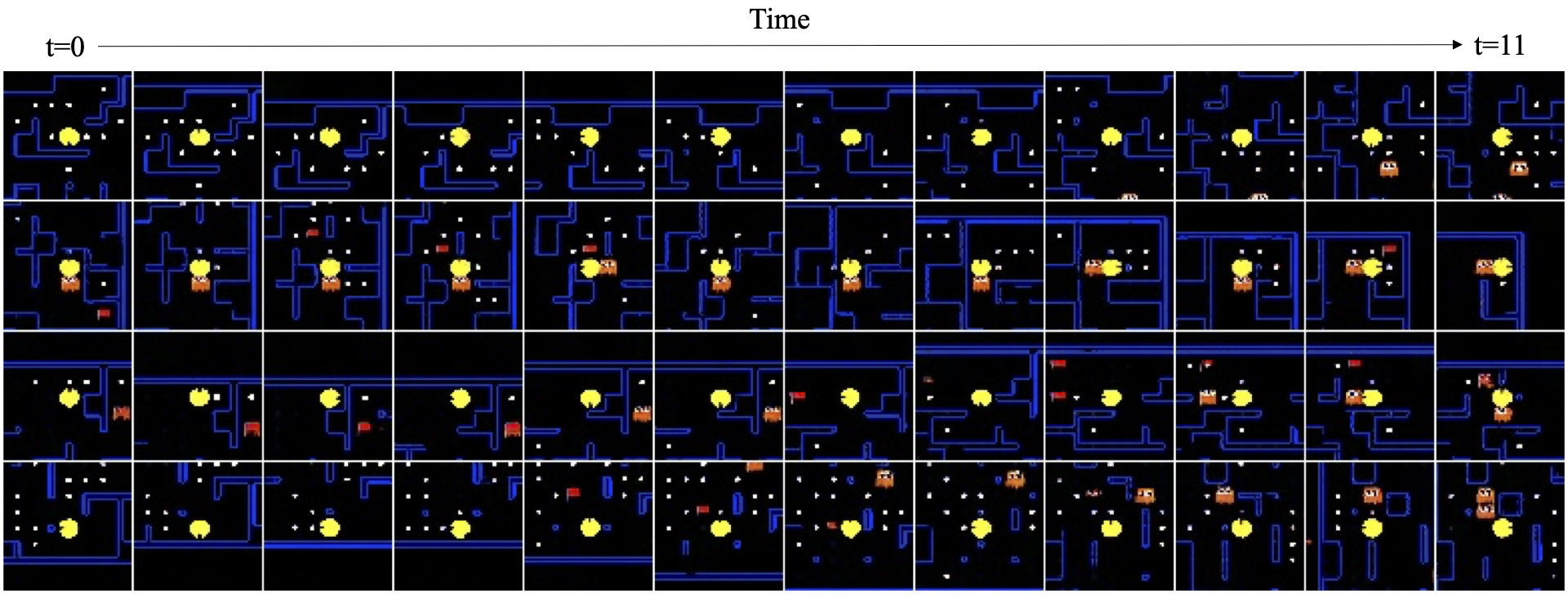
Learning to Simulate Dynamic Environments With GameGAN
Seung Wook Kim, Yuhao Zhou, Jonah Philion, Antonio Torralba, Sanja Fidler
CVPR 2020
project page / arXiv / code / video / bibtex
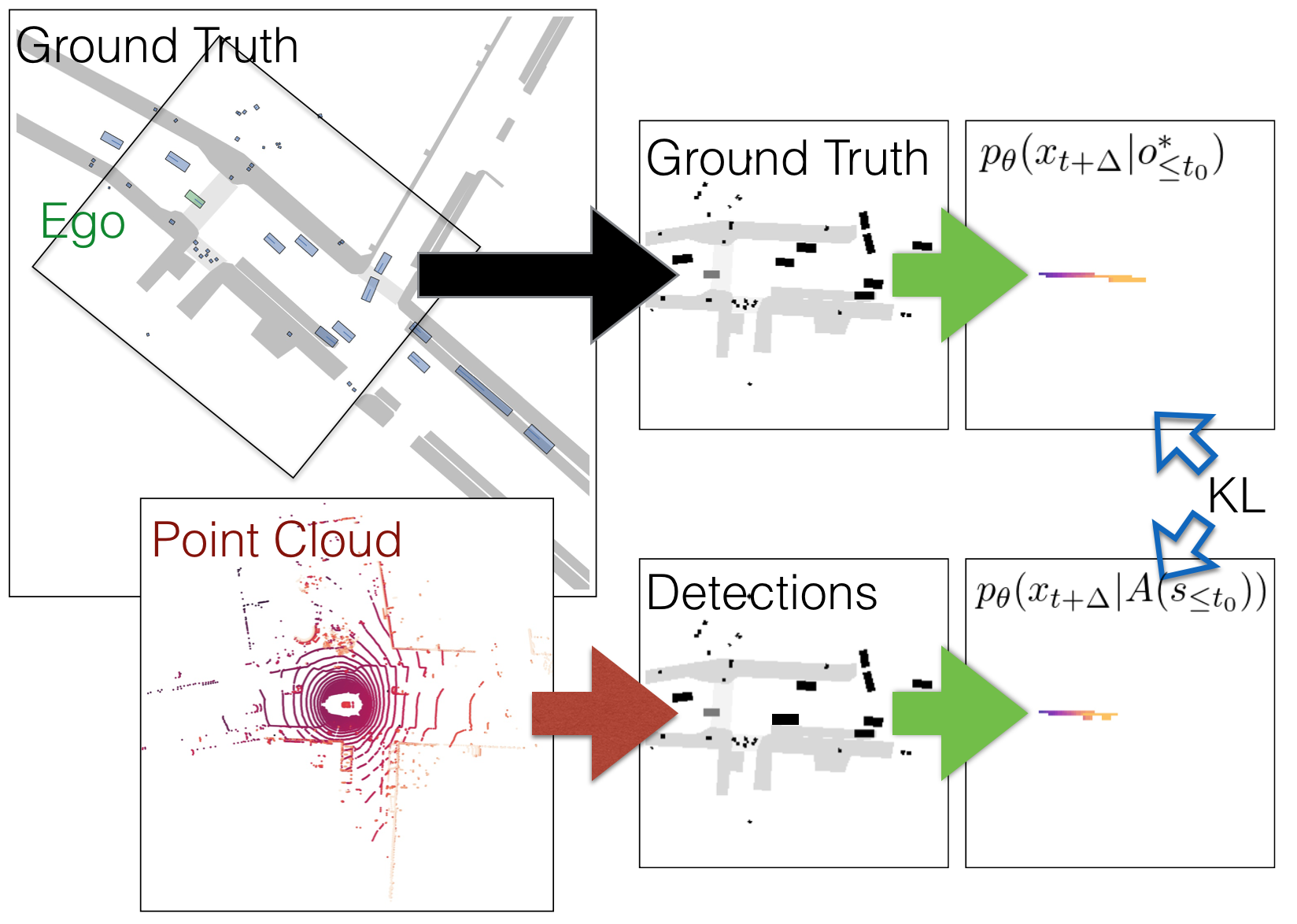
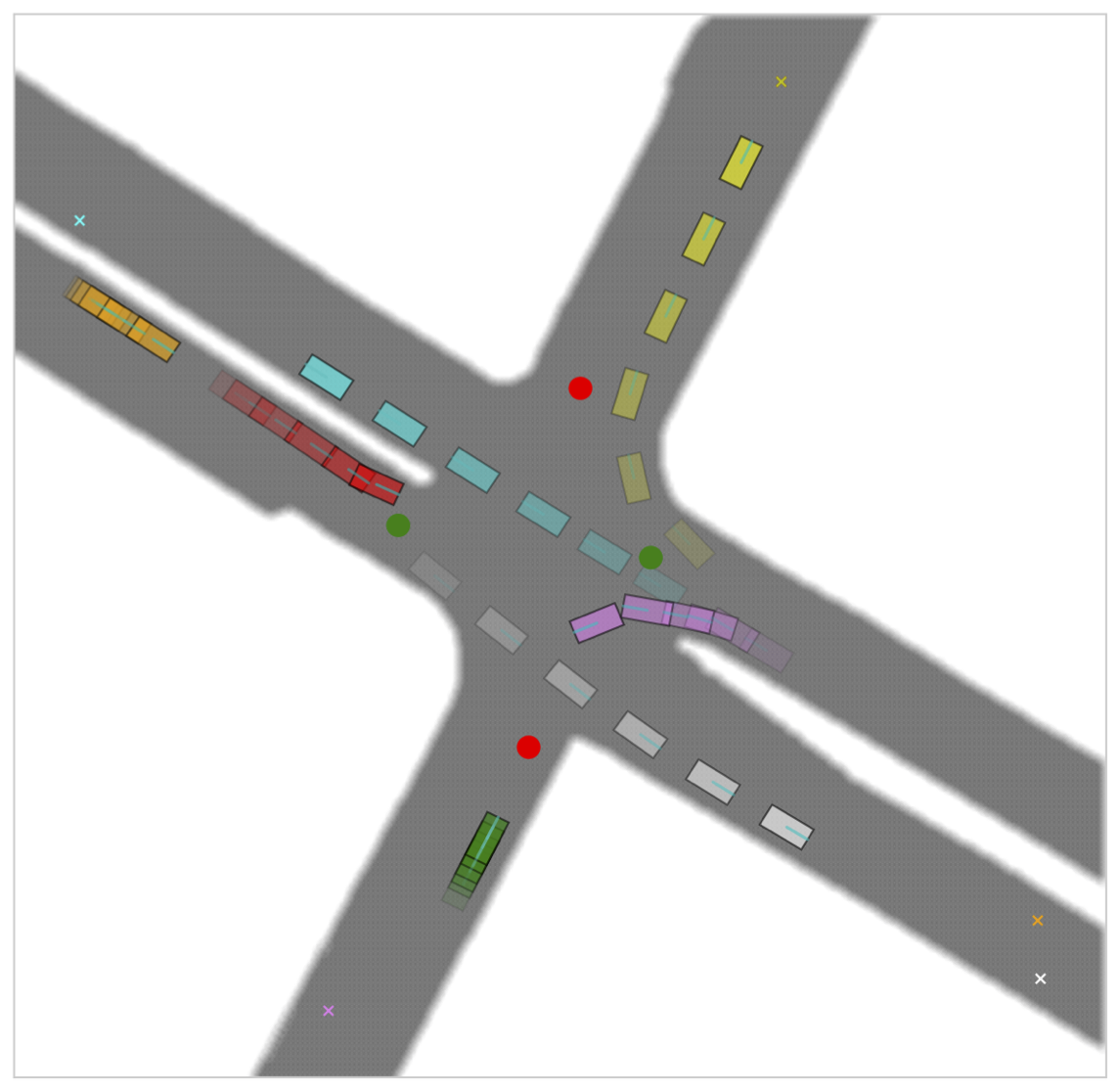
Learning to Evaluate Perception Models Using Planner-Centric Metrics
Jonah Philion, Amlan Kar, Sanja Fidler
CVPR 2020
project page / arXiv / code / bibtex
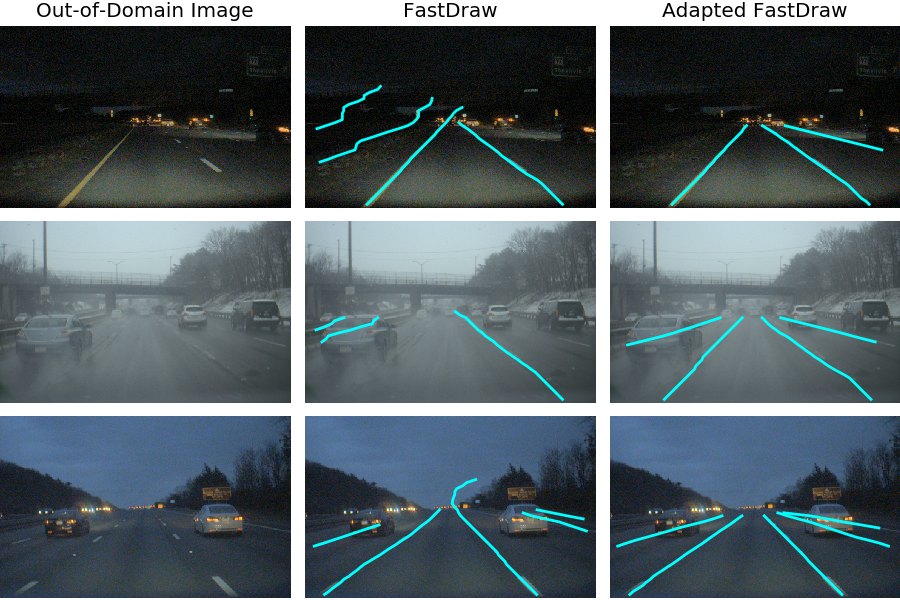
FastDraw: Addressing the Long Tail of Lane Detection by Adapting a Sequential Prediction Network
Jonah Philion
CVPR 2019
Music
- performing with my brother Ethan Philion - soundcloud soundcloud
- courtyard saxophone trio - soundcloud soundcloud
- live coding music in python - youtube