|
1
|
- Geoffrey Hinton
- Max Welling
- Yee-Whye Teh
- Simon Osindero
|
|
2
|
- It is better to associate responses with the hidden causes than with the
raw data.
- The hidden causes are useful for understanding the data.
- It would be interesting if real neurons really did represent independent
hidden causes.
|
|
3
|
- Instead of trying to find a set of independent hidden causes, try to
find factors of a different kind.
- Capture structure by finding constraints that are Frequently Approximately
Satisfied.
- Violations of FAS constraints reduce the probability of a data vector.
If a constraint already has a big violation, violating it more does not
make the data vector much worse (i.e. assume the distribution of
violations is heavy-tailed.)
|
|
4
|
- Stochastic generative model
using directed acyclic graph (e.g. Bayes Net)
- Synthesis is easy
- Analysis can be hard
- Learning is easy after analysis
- Energy-based models that
associate an energy with each data vector
- Synthesis is hard
- Analysis is easy
- Is learning hard?
|
|
5
|
- It is easy to generate an unbiased example at the leaf nodes.
- It is typically hard to compute the posterior distribution over all
possible configurations of hidden causes.
- Given samples from the posterior, it is easy to learn the local
interactions
|
|
6
|
- What if we use an approximation to the posterior distribution over
hidden configurations?
- e.g. assume the posterior factorizes into a product of distributions
for each separate hidden cause.
- If we use the approximation for learning, there is no guarantee that
learning will increase the probability that the model would generate the
observed data.
- But maybe we can find a different and sensible objective function that
is guaranteed to improve at each update.
|
|
7
|
- This makes it feasible to fit
very complicated models, but the approximations that are tractable may
be very poor.
|
|
8
|
- Use multiple layers of deterministic hidden units with non-linear
activation functions.
- Hidden activities contribute additively to the global energy, E.
|
|
9
|
- To get high log probability for d we need low energy for d and high
energy for its main rivals, c
|
|
10
|
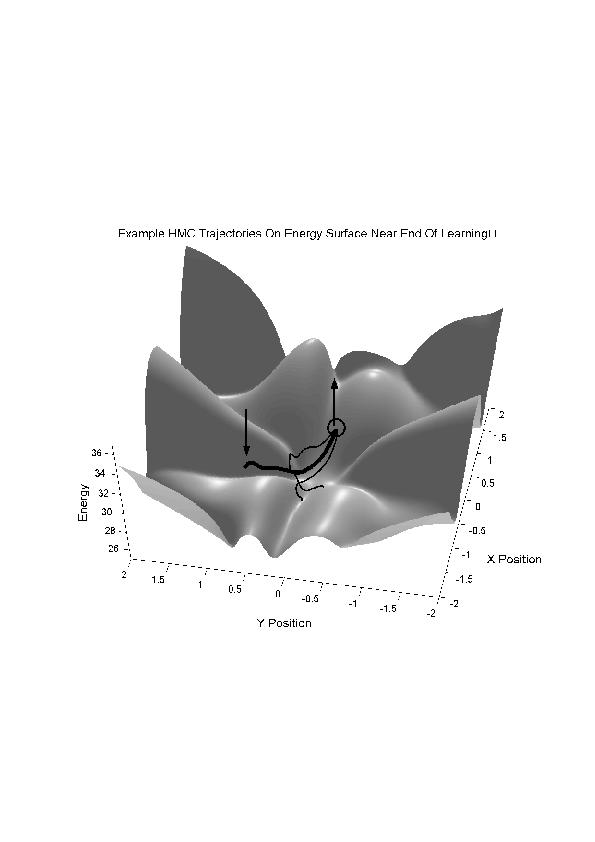
- The obvious Markov chain makes a random perturbation to the data and
accepts it with a probability that depends on the energy change.
- Diffuses very slowly over flat regions
- Cannot cross energy barriers easily
- In high-dimensional spaces, it is much better to use the gradient to
choose good directions and to use momentum.
- Beats diffusion. Scales well.
- Can cross energy barriers.
|
|
11
|
|
|
12
|
- Do a forward pass computing hidden activities.
- Do a backward pass all the way to the data to compute the derivative of
the global energy w.r.t each component of the data vector.
- works with any smooth
- non-linearity
|
|
13
|
- Start at a datavector, d, and use backprop to compute for every parameter.
- Run HMC for many steps with frequent renewal of the momentum to get
equilbrium sample, c.
- Use backprop to compute
- Update the parameters by :
|
|
14
|
- Instead of taking the negative samples from the equilibrium
distribution, use slight corruptions of the datavectors. Only add random
momentum once, and only follow the dynamics for a few steps.
- Much less variance because a datavector and its confabulation form a
matched pair.
- Seems to be very biased, but maybe it is optimizing a different
objective function.
- If the model is perfect and there is an infinite amount of data, the
confabulations will be equilibrium samples. So the shortcut will not
cause learning to mess up a perfect model.
|
|
15
|
- It is silly to run the Markov chain all the way to equilibrium if we can
get the information required for learning in just a few steps.
- The way in which the model systematically distorts the data
distribution in the first few steps tells us a lot about how the model
is wrong.
- But the model could have strong modes far from any data. These modes
will not be sampled by confabulations. Is this a problem in practice?
|
|
16
|
- Aim is to minimize the amount
by which a step toward equilibrium improves the data distribution.
|
|
17
|
|
|
18
|
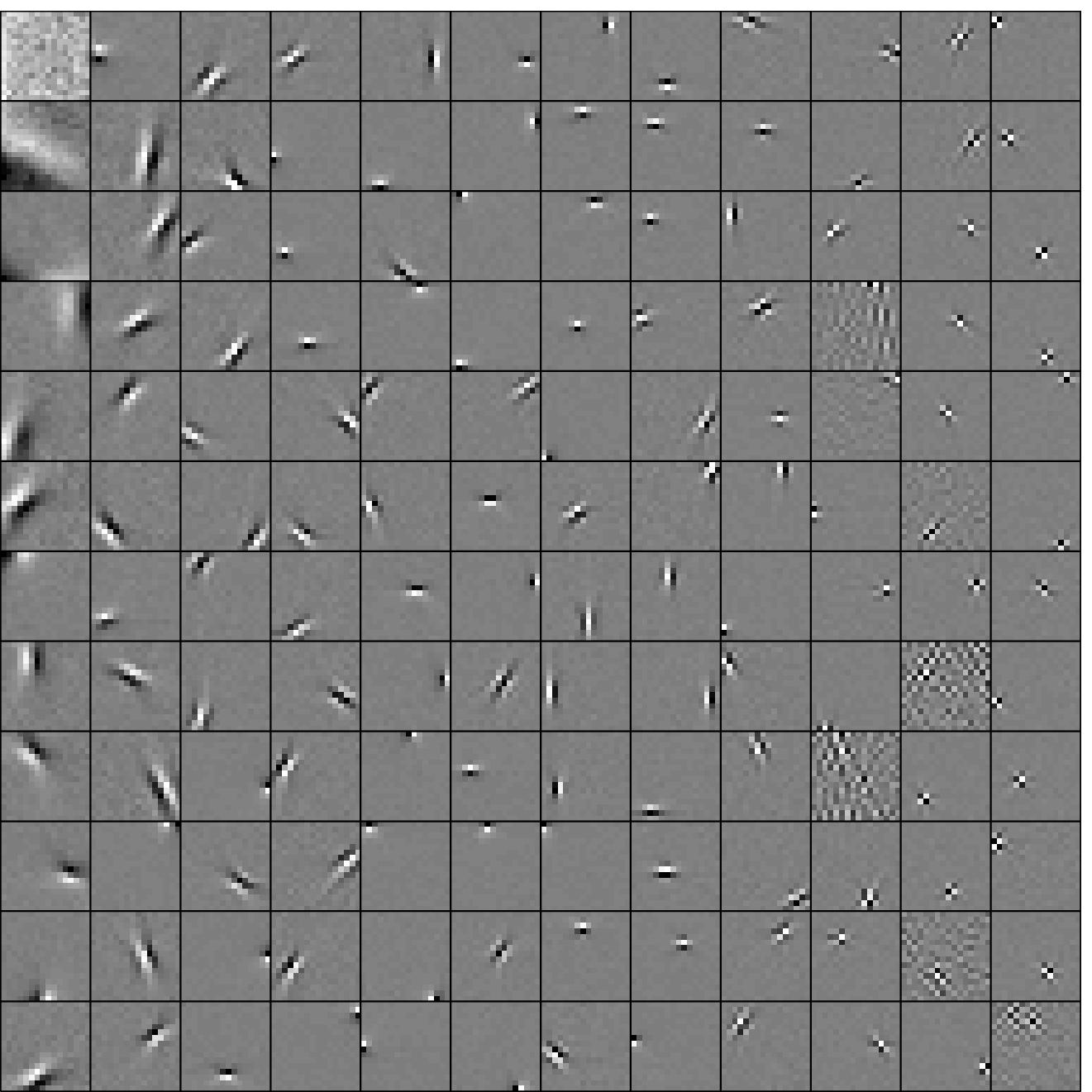
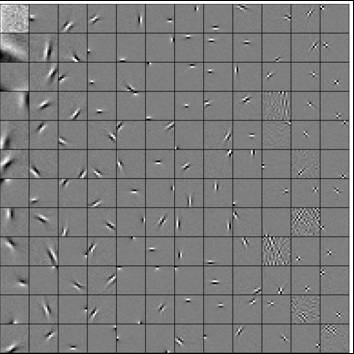
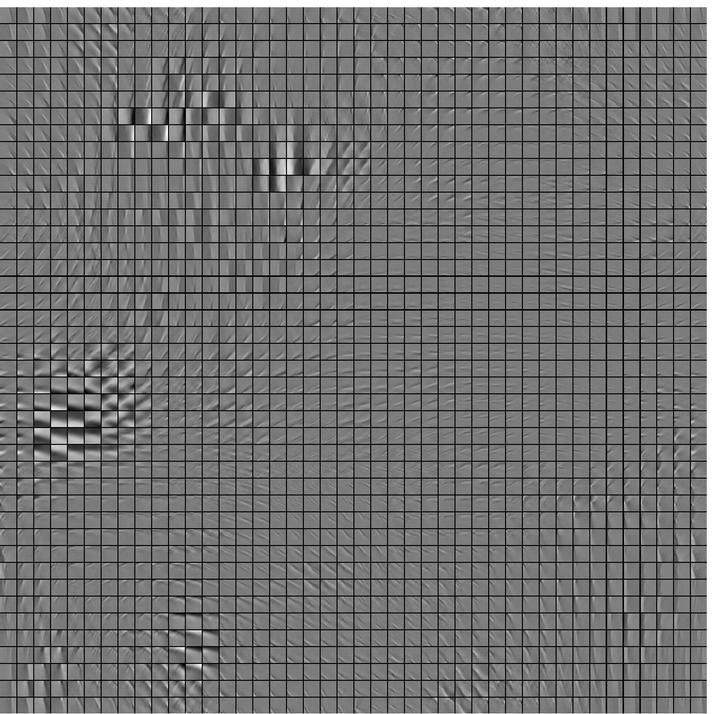
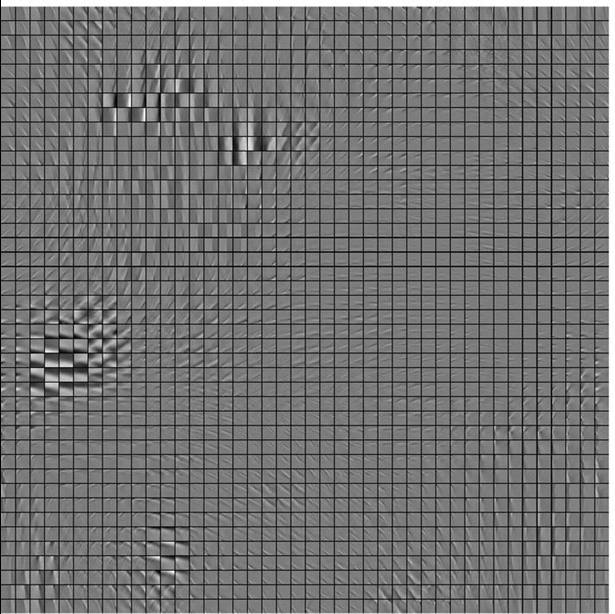
- The intensities in a typical image satisfy many different linear
constraints very accurately, and
violate a few constraints by a lot.
- The constraint violations fit a heavy-tailed distribution.
- The negative log probabilities of constraint violations can be used as
energies.
|
|
19
|
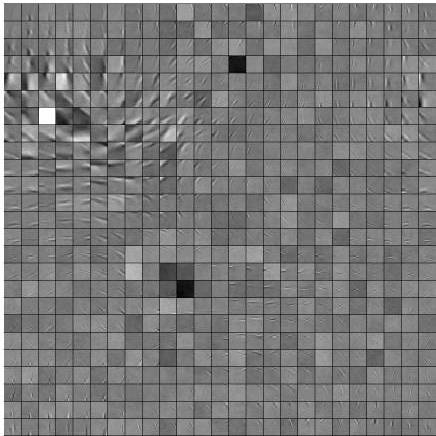
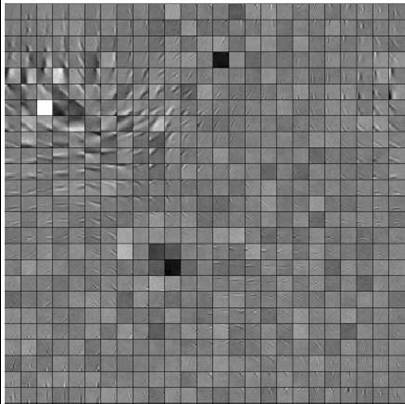
- We used 16x16 image patches and a single layer of 768 hidden units (3 x
overcomplete).
- Confabulations are produced from data by adding random momentum once and
simulating dynamics for 30 steps.
- Weights are updated every 100 examples.
- A small amount of weight decay helps.
|
|
20
|
|
|
21
|
|
|
22
|
|
|
23
|
|
|
24
|
- Hybrid Monte Carlo can only take small steps because the energy surface
is curved.
- With a single layer of hidden units, it is possible to use alternating
parallel Gibbs sampling.
- Much less computation
- Much faster mixing
- Can be extended to use pooled second layer (Max Welling)
- Can only be used in deep networks by learning one hidden layer at a
time.
|
|
25
|
|
|
26
|
|
|
27
|
|

 Notes
Notes{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}